Approach Study Guide
Introduction
This manual will show you the basic skills that you will need as an approach controller. This manual is meant to support your training, but it cannot replace an approach lesson held by the responsible Regional Group. This guide can only show you basic techniques, but it cannot provide you with descriptions on how to solve specific situations in your local area. Nor can this guide replace practice on the network. The step up from tower to approach is probably the hardest part of your ATC training on Vatsim. Be warned, you will need a lot of practice online before you can realistically pass your CPT. However, there is no need to be afraid. The ATC mentors have the necessary experience to help you throughout your training and you are neither the first nor will you be the last to pass his/her CPT on approach.
Most importantly: Have fun!
This Guide has a lot of content and will be overwhelming at first. Unfortunately, there is no way to avoid reading the whole thing as a first step in your training. However, some information will make a lot more sense once you have gained more experience on the network. You are therefore highly encouraged to read this guide or parts of this guide several times throughout your training. For example, you can use it to read up on specific topics that you feel unsure about.
General theory
Airspaces
You already know a little about airspaces from your S2 training. As a tower controller, you became very familiar with the D-CTR airspace. We will now look at some other airspaces which will be become relevant to you in your approach training.
| Class | Clearance required | Separation | Speed limit |
| C |
IFR/VFR |
IFR/IFR, IFR/VFR, traffic info for VFR/VFR |
250kts for VFR below FL100 |
| D |
IFR/VFR |
IFR/IFR, Traffic info for IFR/VFR, VFR/VFR | 250kts below FL100 |
| E |
IFR |
IFR/IFR, Traffic info about known traffic for IFR/VFR, VFR/VFR | 250kts below FL100 |
| G |
- |
FIS on request |
250kts below FL100 |
For completeness, we should quickly mention airspaces A, B and F. Airspace B is similar to airspace C but B requires separation between VFR/VFR while airspace A only allows IFR traffic. There used to be areas with airspace F in Germany but they have since been replaced by RMZ (Radio Mandatory Zone) that require traffic to establish radio contact on a specific radio frequency. RMZs are part of airspace G and therefore remain uncontrolled.
Airspace structure in Germany
The following picture illustrates the airspace structure around larger airports (e.g. Frankfurt or Munich) on the left and smaller airports in the centre (e.g. Paderborn/Lippstadt). Uncontrolled airfields with IFR-procedures are protected by a radio mandatory zone (RMZ).
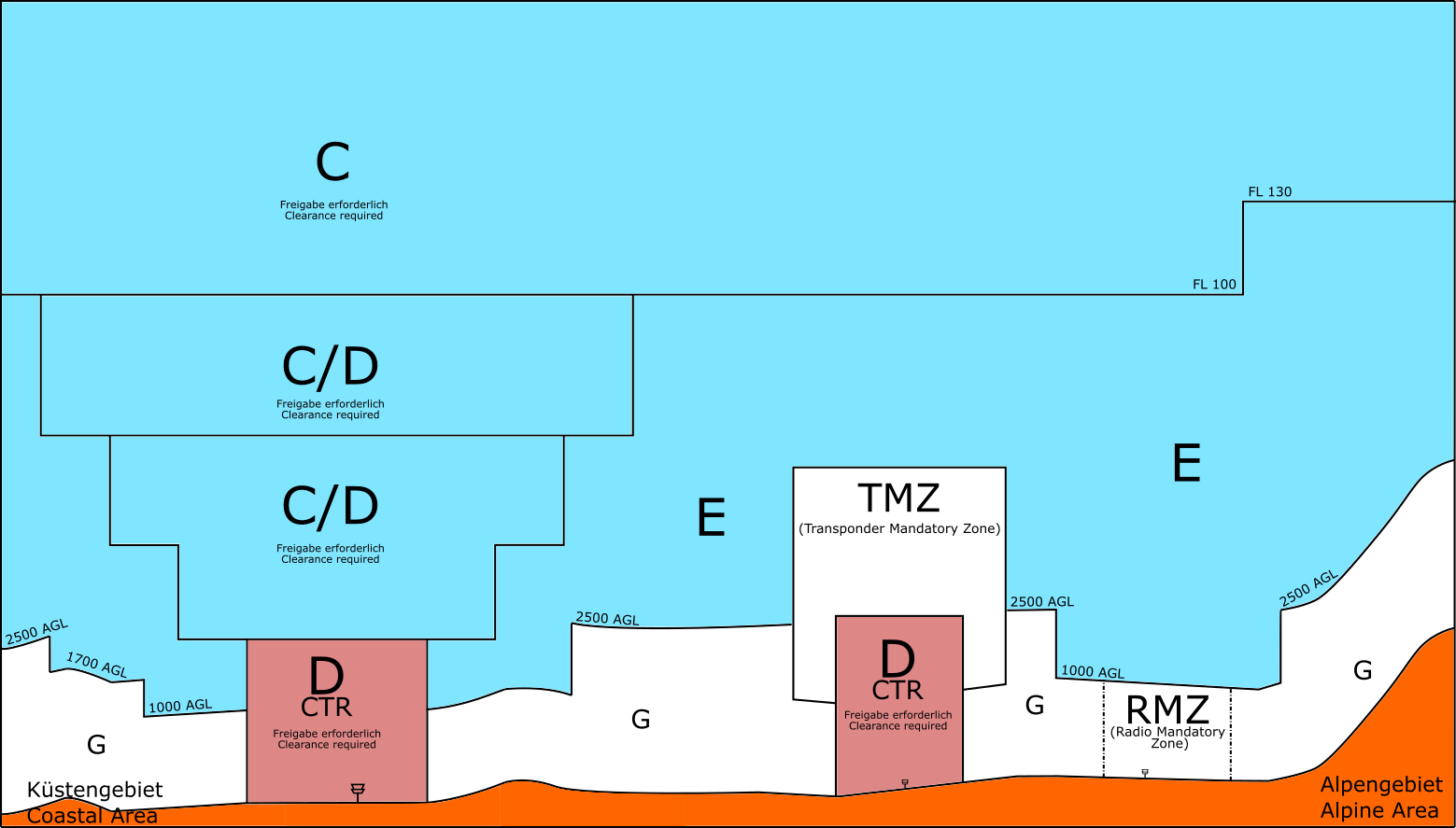
Above FL100 (exception FL130 in some places around the Alps) you find airspace C. Below airspace C there is usually an airspace E followed by airspace G close to the ground.
Around controlled airports you will usually find either airspace C or airspace D above a control zone of airspace D. However, there are lots of exceptions and every airport has a different airspace structure. Therefore, it is essential that you familiarize yourself with your local airspace structure before you start controlling. This can easily be done by using the DFS AIS service that includes a chart of the airspace structure in all of Germany (free registration required).
Lastly it should be mentioned that airspaces C and D are mainly for protecting busy IFR traffic routes from unidentified VFR traffic flying close by.
You should avoid descending IFR traffic outside of airspace C and D into airspace E whenever possible. At most busy German airports there is usually no reason to let IFR traffic leave the protected airspace.
Terminal Maneuvering Area (TMA)
The TMA is the airspace immediately around a CTR that all traffic to or from a controlled airport has to pass through. The majority of your responsibility will be the traffic inside the TMA. The dimensions of your TMA and the sector you are responsible of is strictly defined by your FIR.
It must be emphasised that parts of your TMA are always airspace E that you are responsible of. The TMA consists of several different airspace classes and it is your job to remember where one airspace class ends and another one begins in order to keep IFR traffic inside controlled airspace and to guide VFR appropriately within uncontrolled and controlled airspace.
Identification
Unlike tower controllers, radar controllers cannot look out the window to provide air traffic services. They have to rely on data collected by what are called surveillance systems. Examples of these are Primary Surveillance Radar (PSR) and Secondary Surveillance Radar (SSR).
Primary surveillance radar (PSR)
When radar was first invented it only existed as a primary radar. A primary radar sends out electromagnetic waves in all directions and displays a dot on the screen for each reflection it detects. However, there is no way to know which dot on the screen belongs to which aircraft - this is where identification comes into the picture.
An aircraft is identified if we can see its target on the radar screen and are certain which aircraft the target belongs to.
But if the aircraft cannot send any data to us, how do we know which target is which aircraft? When using PSR, there are multiple so called methods of identification [1]:
- position report: correlating a target with an aircraft that reports is position over or its distance and bearing from a significant point on your screen and making sure the track of the target is consistent with the aircraft's path / reported heading,
- departing aircraft: correlating a target with a departing aircraft within 1NM of the end of the runway,
- turn method: instructing an aircraft to change the heading by 30 degrees or more, and observing the change
- transfer of identification: more on this later.
Secondary surveillance radar (SSR)
Modern surveillance systems use a transmitter/receiver combination that interrogate transponders onboard the aircraft which then send data back to the ground station. This is the fundamental difference to PSR systems where the ground station receives passive signals (reflections). There are different interrogation modes which transmit various data [2]:
| Mode |
Data transmitted |
| A |
4-digit octal identification code, i.e. Squawk |
| C |
Aircraft's pressure altitude |
| S |
Callsign, unique 24-bit address, selected altitude, ground speed, indicated airspeed, etc. [3] |
Modes A and C are often combined to mode 3 A/C. Using SSR, there are additional methods of identification:
- recognition of the aircraft identification in the label,
- recognition of an assigned discrete code, the setting of which was confirmed by the pilot,
- observation of the setting/changing of an instructed individual code,
- observation the compliance with an instruction to squawk IDENT.
The most common way to identify an aircraft in our simulated environment is “Recognition of Aircraft ID (Callsign) in an SSR Label”. So basically, whenever you see a label with a callsign, this callsign is linked to a flight plan and the aircraft is properly identified. If a pilot is unable to turn on his transponder, you can identify him using the methods listed for primary radar.
Before providing surveillance services (any service provided directly by means of an ATS surveillance system, such as primary or secondary radar) the controller must establish identification and inform the pilot.
[1] ICAO Doc 4444, Procedures for air navigation services - Air traffic management, Sixteenth edition, 2016
[2] Aviation transponder interrogation modes, Wikipedia
[3] Skybrary Mode S
Verification of level information
As you know a mode C transponder gives information about the pressure altitude of an aircraft. To use this level indication for vertical separation a controller is obliged to verify this level information as soon as possible after initial contact. To do so you simply compare the reported level of the pilot to the one indicated on your radar screen. Taking into account real life regulations, a discrepancy of 200ft is allowed to exist. Within VATSIM’s simulated environment, a higher offset can be accepted. If the reported level differs significantly from the one indicated on your radar, the controller shall instruct the pilot:
DLH123A, CHECK ALTIMETER SETTING AND CONFIRM LEVEL / (level)
If the problem persists after the correct pressure setting is confirmed, the pilot shall be instructed to stop the altitude data transmission:
DLH123A, STOP SQUAWK CHARLIE WRONG INDICATION
The next sector has to be informed and level reports shall be used to ensure vertical separation.
Often wrongly considered as a part of the identification process, a pilot’s level report is completely independent from the procedures shown in the previous chapter.
Separation
One of the main tasks of a radar controller is ensuring separation at all times as this allows for a safe flow of traffic. We distinguish between different types of separation.
As a general rule, ATC shall provide separation between
- all flight in airspaces A and B,
- IFR flights in airspaces C, D, E,
- IFR flights and VFR flights in airspace C,
- IFR flights and SVFR flights.
Radar (horizontal) separation