Topsky Conflict Detection Tools
- Medium Term Conflict Detection (MTCD)
- Short-Term Conflict Alert (STCA)
- Minimum Separation Tool and QDM
- Probe Tool
Medium Term Conflict Detection (MTCD)
General
Medium-Term Conflict Detection (MTCD) is a flight data processing system designed to predict future conflicts between flights in the controller's area of responsibility over a time horizon of up to 20 minutes.
MTCD aims to facilitate a move from the current largely reactive form of air traffic control to more proactive control. This would thereby balance more evenly the workload of tactical and planning tasks, enhance sector efficiency, and provide an even safer and better service to airspace users.
MTCD is a natural extension of the Short Term Conflict Alert (STCA) concept. However, while STCA is a safety net function and its objective is solely to improve the safety of ATC service provision, MTCD is a controller tool supporting pre-planning. Therefore, both tools serve different purposes.
System Functions
The MTCD system works by checking the aircraft’s predicted route up to the defined prediction time and calculating if the separation with other aircraft will be less than the defined prediction distance. In case the predicted distance is less than the defined separation minimum, the MTCD system will notify the controller with a specific warning. The planned trajectory will be updated constantly.
Explanation of the 4D Setup
The MTCD system will check for lateral distances along the predicted lateral trajectory. Lateral separation less than the defined minimum separation will result in an MTCD conflict warning.
Additionally, the MTCD system programmed in the 4D setup will also check for the vertical separation along the vertical trajectory. In this case, a 4000 ft buffer will be applied to the current climb profile (similar to the 1 NM buffer for the lateral MTCD prediction).
Example:
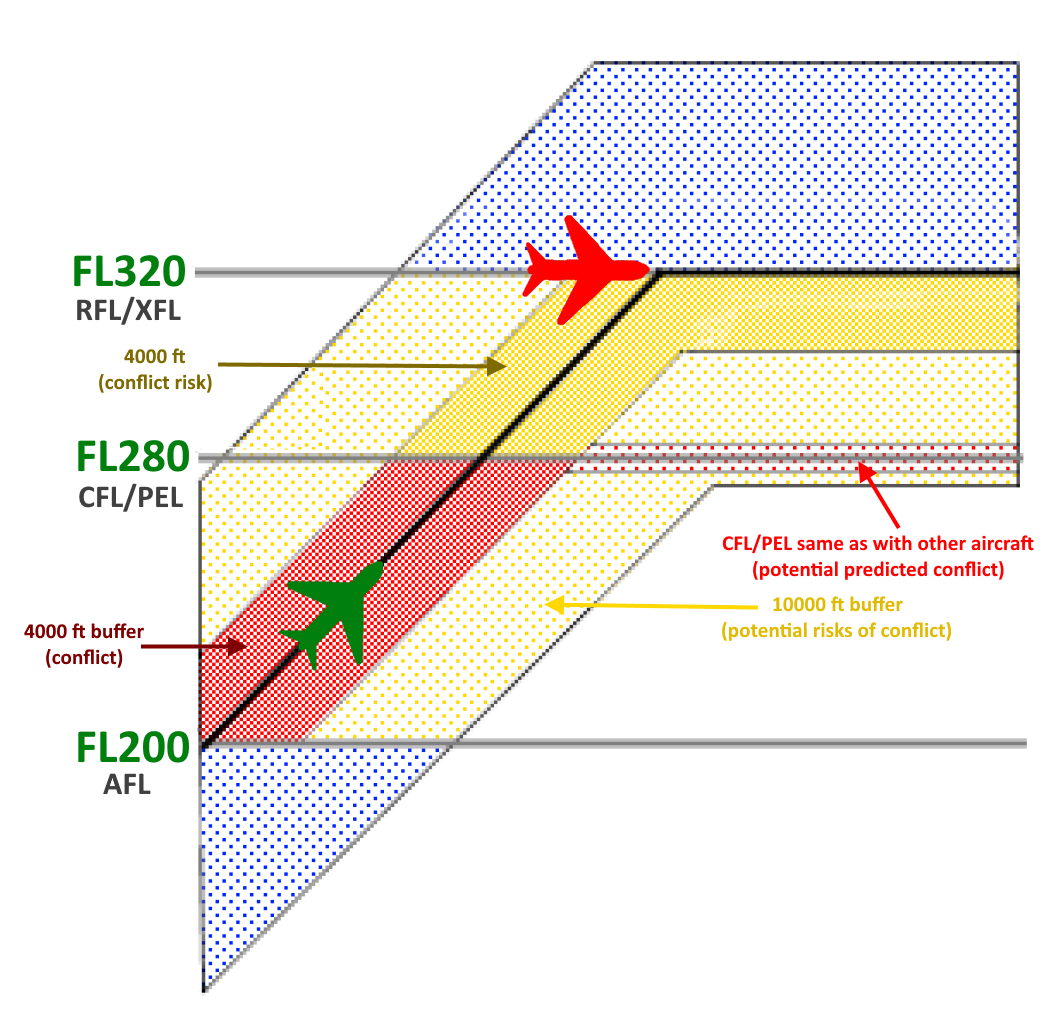
In the picture below, the green aircraft should climb from FL200 to FL320, which is the requested final flight level for this aircraft. As FL320 is already occupied by the red aircraft, the controller decides to instruct a step-climb to FL280 instead. Once the new CFL is entered in the aircraft label, the MTCD system will look for conflicts along the route, considering the current ground speed and current rate of climb.
As the prediction of the trajectory can be somewhat inaccurate, the system looks for conflicts that would occur within the lateral buffer of the aircraft if the vertical separation between both aircraft is predicted to be within the 4000 ft buffer (red shaded area).
This means that an aircraft at FL260 with a lateral distance of less than the required lateral separation would not show, if the MTCD system calculated that both aircraft would meet at a vertical separation of 6000 ft.
Note: A conflict will only be shown if both aircraft vertically meet within the 4000 ft buffer of the predicted climb profile and if the lateral distance between both aircraft is less than the defined separation minimum.
In this example, both EWG61A and EJU7946 are predicted as a conflict by the MTCD system. Even though both aircraft are currently separated by 2000 ft to their actual flight level (AFL) and also 2000 ft to their cleared flight level (CFL), the system detects that EJU7946 has a higher climb rate than EWG61A. Due to that, the 4000 ft buffer will not be maintained. As both aircraft will roughly meet at the same point with a separation of less than 5 NM, a conflict warning will be shown by the MTCD system.
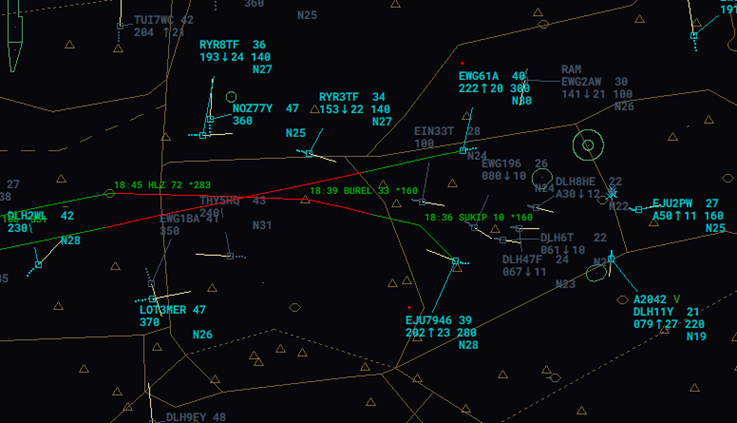
Note: MTCD conflict warnings will be shown as a red segment on the aircraft's route, a red dot above the aircraft's callsign and/or as an MTCD warning above the aircraft's callsign in the detailed label.
Additionally, the MTCD system will also look at what would happen in the future if the controller issues a further climb clearance to the requested flight level (RFL) or planned exit level (XFL). Taking into account the same buffers as for the conflict, so-called conflict risk is displayed in the dark yellow shaded area.
In our graphic, the system would not show any conflict warning, as there is no traffic penerating the green aircraft's buffer for the climb from FL200 to FL280, but the system will show a conflict risk warning in yellow to warn the controller that a conflict will exist in case the green aircraft is cleared to FL320. This would result in a conflict with the red aircraft.
Note: A conflict risk warning will always immediately result in a full conflict warning if the warning is ignored by the controller.
Here, no conflict exists, as UAE321 is cleared to FL160 and DLH1EK is maintaining FL200. Therefore, the MTCD system will not show any red conflict warning. But the system predicts that once the vertical separation is not ensured anymore, both aircraft will result in a conflict as the lateral separation will be less than required.

This helps the controller spot potential cleared conflicts. In case the controller instructs UAE321 to continue the climb to FL210, the MTCD warning will change from a conflict risk to a conflict, and therefore will change colour from yellow to red. The same applies if the DLH1EK would get a descent instruction below FL170.
Remember: A red MTCD warning always needs to be solved, as great potential for a (cleared) conflict exists. Yellow warnings only warn the controller about future clearances and will turn to conflict warnings if ignored.
Besides the conflict warning and conflict risk warning, other warnings exist:
- Potential risk conflicts: Calculate the same area as for conflicts and conflict risks, but with a buffer of 10000 ft (instead of 4000 ft).
- Potential predicted conflicts: Will show conflicts that would occur in case the aircraft stays on the CFL/PEL in the future and does not get a further climb as assumed. In our example, a potential predicted conflict could occur in case the green aircraft stays at FL280 for some time, in case another aircraft is also at FL280.
- Potential conflicts (blue): Traffic crossing at a lateral distance less than the required minimum separation, but way outside of the vertical buffer.
Note: The detection of potential predicted conflicts and potential risks of conflict can be disabled, in which case they will be converted to potential conflicts. In most cases, the conflict warning and conflict risk warning are sufficient for pre-planning and conflict solving.
Weak Points
Remember that the MTCD is to be used for pre-planning only. As the MTCD calculation is not exactly accurate, which is also a result of the buffer being larger than the required minimum separation, false warnings can occur. Additionally, the planned trajectory solely relies on the current aircraft's conditions, such as ground speed and climb/descent rate. Whenever one of these values changes unexpectedly, the result of the MTCD warning can change as well.
Remember: Every MTCD conflict warning always need to be checked by the controller by applying other measures such as SEP-Tools and/or QDMs.
Also, MTCD can not be used for actual short-term conflict alerts, and it also does not support any aural warnings.
Conflict and Risk Display (CARD)
The CARD window presents the MTCD conflicts and conflict risks. This window greatly helps the controller to spot any conflicts in the area calculated by the MTCD system. The CARD can be very useful during periods of high traffic and lets the controller better detect and manage predicted conflicts.
On the left side of the window, the conflicting aircraft pairs will be listed. Hovering the mouse cursor above the aircraft pair will display the route of both aircraft, highlighting the MTCD conflict warning on the aircraft's route. With a left click on the aircraft pair, the predicted conflict warning can be acknowledged by the controller if the conflict is not relevant to the controller.
Note: Conflicts not relevant to the controller should always be acknowledged, turning the MTCD warning to grey. This helps to keep a better overview of conflicting aircraft in the sector.
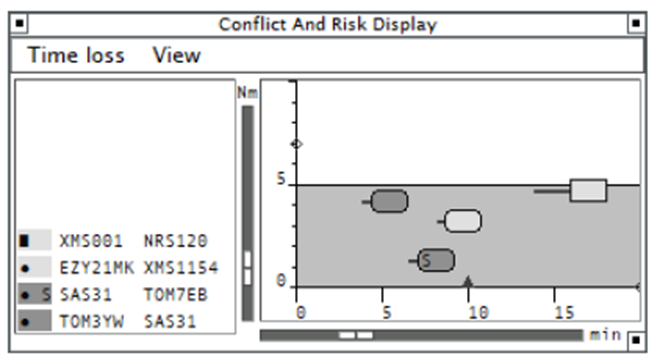
On the right side of the CARD, the conflicting aircraft pairs will be shown along a vertical (distance) axis and horizontal (time) axis. The left side of the conflict label in the display shows the time till to the point of closest approach. A line in “CARD Time Vector” colour, extending to the left from the label, marks the time when the separation will decrease below the prediction distance. If a SEP-Tool (min SEP) is displayed for the conflict pair on the radar screen, an “S” is displayed on the label of the aircraft's conflict pair in the CARD.
Short-Term Conflict Alert (STCA)
General
A Short Term Conflict Alert (STCA) is a system to warn the ATCO of any situation where user-defined minimum separation distances between any pair of surveillance tracks is, or is predicted to be, violated within a short look-ahead time.
Function
The STCA will be triggered if the predicted minimum separation is less than the defined minimum separation. The warning will appear at least 50-90 seconds before the less separation.
Any STCA will be shown by colouring the aircraft's label in an urgency colour (mostly red). Additionally, a one-minute-long prediction line is displayed, and an Alert List will be opened, showing the aircraft's callsign and the minimum predicted horizontal separation.
Minimum Separation Tool and QDM
Minimum Separation Tool
The minimum separation tool displays the predicted minimum lateral separation between two radar tracks within the next 30 minutes, assuming both of them maintain their present ground tracks and speeds. The minimum separation tool can be used both laterally as well as vertically.
The minimum separation tool complements the MTCD system as the controller can evaluate the situation more precisely and therefore can decide whether action needs to be taken or not.
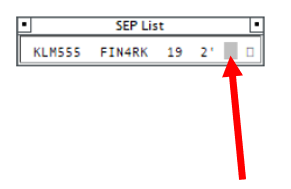
The minimum separation tool can be activated by pressing ALT + S and then left-clicking on both aircraft's labels. Once this is done, a SEP list window will open, showing the selected aircraft pair, the minimum distance calculated at the Closest Point of Approach (CPA) and the time to the CPA. Additionally, two lines will be displayed showing the distance and track to the CPA.
 In this example, EJU48JG and RYR40UR will meet closest in 3 minutes with a lateral separation of 7,7 NM.
In this example, EJU48JG and RYR40UR will meet closest in 3 minutes with a lateral separation of 7,7 NM.
Besides between lateral movements shown in the example above, the minimum separation tool can also be used for vertical movements. Here, the vertical minimum separation tool comes into play. This tool can be activated by left-clicking on the colored box of the SEP List window.
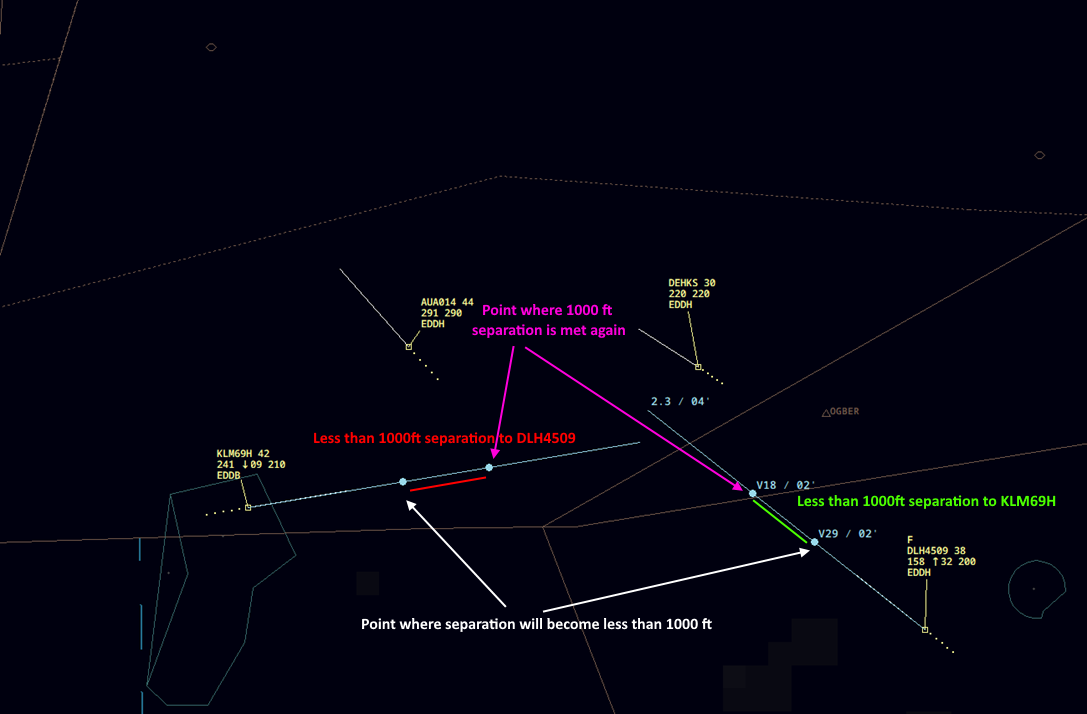
Furthermore, some dots will appear on the lines. These will indicate the lateral distances between both aircraft once the vertical separation is no longer ensured (less than 1000 ft).
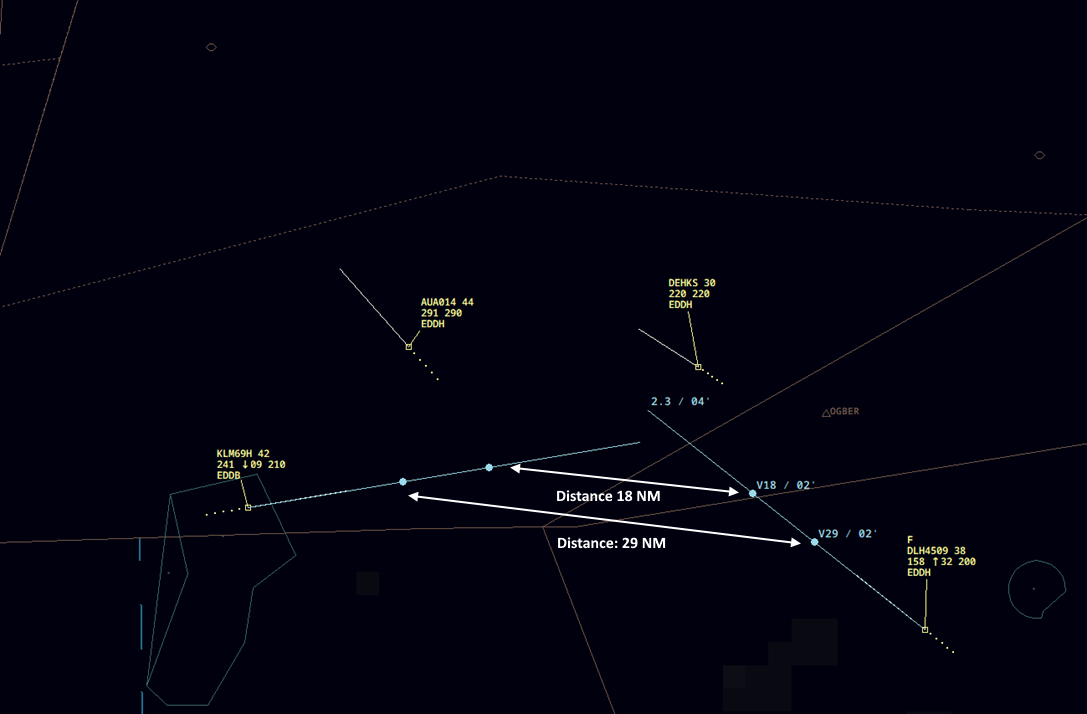
In the example below, the lateral min. separation will be 2.3 NM (which will be reached in 4 minutes). As the KLM is descending and the DLH is climbing, there is a good opportunity that the conflict can be solved vertically. Therefore, we want to know if the current climb/descent rate is sufficient for a safe clearance.
The points shown will indicate the lateral distance between both aircraft at the point where vertical separation will be lost and regained. In this case, KLM69H and DLH4509 will have a vertical separation of 29 NM once they both reach a level where the separation will be less than 1000 ft between both aircraft. As both aircraft will continue climbing/descending, there will be a second dot on each line. In our example, both aircraft will have a lateral distance from each other of 18NM once they both reach a level where 1000 ft vertical separation is met again.
Therefore, we can conclude that the current descent and climb rates are good enough to maintain separation at all times, as the lateral separation in this movement will never be less than required.
Still, as vertical descent/climb rates can vary all the time, the controller needs to instruct assigned rates until both aircraft have crossed vertically. This situation can result in an unsafe clearance if no rates are assigned.
QDM
The QDM tool is a line that connects two points on the radar display and provides information about the distance and the bearing between them. The controller activates the QDM manually by pressing ALT + Q and clicking the points of interest, which may be a point on the screen, a waypoint or navaid or an aircraft track. A QDM can be deleted again by right-clicking on the line. Alternatively, all QDMs on the radar screen can be deleted by pressing ALT + X.
 This picture shows a QDM line connected between an aircraft and a waypoint. The QDM is showing the bearing and distance to the waypoint as well as the time at which the aircraft will reach the waypoint based on the current ground speed.
This picture shows a QDM line connected between an aircraft and a waypoint. The QDM is showing the bearing and distance to the waypoint as well as the time at which the aircraft will reach the waypoint based on the current ground speed.
 The picture shows a QDM line connected between two aircraft. The QDM is showing the distance and bearing between both aircraft.
The picture shows a QDM line connected between two aircraft. The QDM is showing the distance and bearing between both aircraft.
Furthermore, the controller can also use a so-called multi-QDM connecting multiple aircraft to the same waypoint. The advantage of the multi-QDM vectors is that when hovering over a track label of one of the tracks, a relative distance indication is added to the labels of all other vectors belonging to the same multi-QDM group, showing in parentheses the difference in the distance value compared to the selected track.
 The picture shows a multi-QDM of all three aircraft to a waypoint. Besides the usual information, the relative is shown.
The picture shows a multi-QDM of all three aircraft to a waypoint. Besides the usual information, the relative is shown.
Probe Tool
General
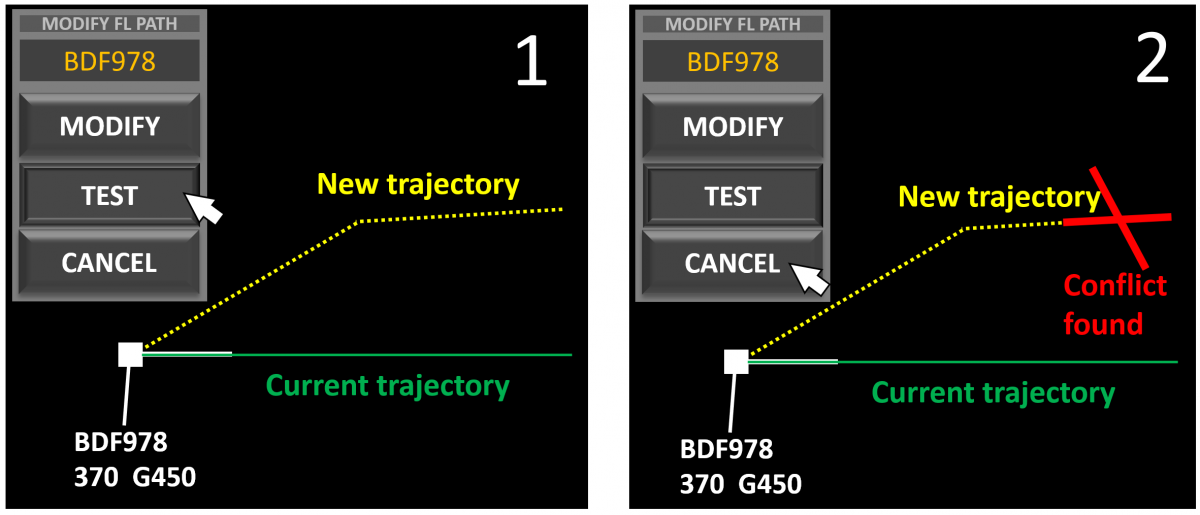
Probe (what-if) is a tool that allows the controller to test whether a planned clearance would cause a conflict without making any real change to the system.
If Probe is chosen, the software creates a new, temporary trajectory and sends it to the MTCD subsystem. The MTCD processes the proposed change and provides information about the potential conflicts (or lack thereof) that would happen should the clearance be issued. The controller may then choose to proceed with the clearance or to go for an alternate plan.
 https://skybrary.aero/articles/probe-what-if-controller-tool
https://skybrary.aero/articles/probe-what-if-controller-tool
Function
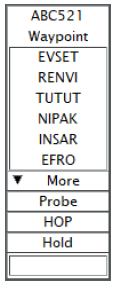
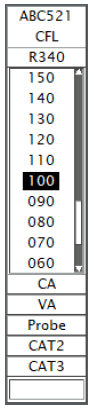
The Probe tool can be used for waypoint direct clearances and climb/descent clearances. In Topsky, the Probe tool is activated by clicking on the "Probe" button in the waypoint or CFL menu. The controller then needs to move the mouse cursor over the desired waypoint or level to check if the system detects any possible conflict (MTCD).
The calculation of the new trajectory can take some time. Allow the system to calculate everything by hovering the mouse cursor above the desired waypoint/level for at least 5 seconds!
Benefits
Probe has the potential to increase safety and reduce controller workload in some situations, as it:
- Allows the controller to test a (complex) clearance before making any real changes or causing unwanted coordinations.
- Provides the controller with a representation of the actual and a would-be situation simultaneously.
- Provides a one-click option for confirmation or rejection of the new trajectory.
- Provides defence against blind spots.