# Praktische Verfahren
Angewandte Lotsenpraxis vom Delivery bis zum Centerlotsen
# Delivery / Ground / Tower
# Pushback und Rollführung
Ground/Apron ist für den Pushback und die gesamte Rollführung am Flughafen verantwortlich. Dabei unterscheiden sich Ground und Apron dahingehend, dass in der Realität Ground von der DFS und Apron vom Flughafenbetreiber selbst betreut wird. In Deutschland gibt es sechs Flughäfen mit der Station Apron: Berlin, Dresden, Erfurt, Frankfurt, Hamburg und München. Die jeweiligen Zuständigkeitsbereiche sind in der jeweiligen SOP des Flughafens geregelt.
Die Rollführung am Boden sollte nicht unterschätzt werden, da sie je nach Flughafen ein großes Maß an Aufmerksamkeit und vorausschauendes Arbeiten erfordert!
### Pushback
Da Flugzeuge nicht rückwärts rollen können, müssen sie in der Regel von einem Schlepper (engl. tug / tow truck) von der Parkposition auf einen Rollweg zurück gedrückt werden (pushback). Teilweise gibt es auch Parkpositionen, wo der Pilot aus eigener Kraft raus rollen kann (Durchrollpositionen / Taxi-out positions). Details dazu sind ggf. in den SOPs des jeweiligen Flughafens geregelt.
Der Pushback erfolgt in der Regel immer auf einen Rollweg. Gibt es mehrere Möglichkeiten wie der Pushback erfolgen kann, muss der Lotse dem Piloten mitteilen, wie dieser zu erfolgen hat. Am häufigsten wird dabei die Richtung angegeben, in welche der Pilot nach dem Pushback schauen soll (z.B. *facing west*). Ebenso können abweichende Rollwege angegeben werden (z.B. ein Rollweg, welcher sich nicht direkt hinter dem Gate befindet oder wenn vorhanden eine blaue/orangene Linie). Dafür sollte der Lotse bereits vor dem Pushback einen Plan für die spätere Rollführung haben, um möglichst effizient zu arbeiten.
| Station | Phraseologie |
| **Pilot** | München Apron good day, DLH5KC, stand 205A, request pushback. |
| **ATC** | DLH5KC, München Apron good day, pushback approved, facing south. |
| **Pilot** | Pushback approved, facing south, DLH5KC. |
Es gilt zu beachten, dass ein Rollweg durch den Pushback mehrere Minuten blockiert sein wird (variiert je nach Flugzeugtyp und Pilot). Aus diesem Grund ist es besonders wichtig, das gesamte Rollfeld im Blick zu behalten und vorallem an großen Flughäfen vorausschauend zu arbeiten.
Sollte der Pushback nicht sofort möglich sein (z.B. da sich bereits ein Flugzeug hinter diesem befindet oder noch ein Inbound abgewartet werde muss), ist dies dem Piloten mit *hold position* und im Idealfall einer kurzen Info auf was er noch warten muss, mitzuteilen. Sollten zwei wartende Outbounds auf der Frequenz sein, die beide bereit für den Pushback sind, kann es je nach Situation anschließend auch vorteilhaft sein, vom "First come, first serve" Prinzip abzuweichen, wenn dadurch die Wartezeiten insgesamt reduziert werden können.
### Rollführung (Taxi)
Nachdem der Pushback abgeschlossen ist und sich der Pilot bereit zum Rollen meldet, wird dieser üblicherweise zum Rollhalt der Piste oder an einzelnen Flughäfen nur bis zur Übergabegrenze zwischen Tower/Ground und Apron geführt. Dabei darf der Pilot in der Regel nicht von den gelben Rollleitlinien abweichen. Ausnahmen sind, wenn vorhanden, in der jeweiligen SOP geregelt.
Die Rollfreigabe kann dem Piloten auch erteilt werden, wenn sich davor noch ein weiteres Flugzeug befindet, welches noch nicht bereit zum Rollen ist. Der Pilot muss dahinter anhalten und wird erst weiter rollen, sobald sich der vordere Flieger bewegt. Bei einer sehr komplexen Rollführung ist es hilfreich, die Route in mehrere Abschnitte aufzuteilen, um das Readback des Piloten zu vereinfachen, zu beschleunigen und das Risiko für Fehler zu minimieren.
*[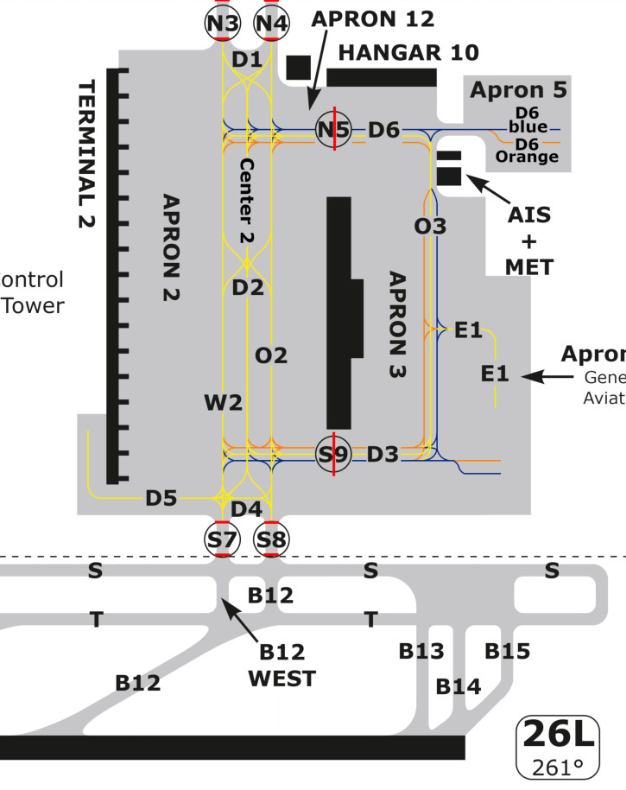](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-10/atd-taxi-eddm.png)
Groundlayout München EDDM*
Je nach Verkehrssituation muss mit *hold shorts* oder *give way* Anweisungen gearbeitet werden (siehe unten), um mögliche Konflikte am Boden zu lösen. Kann davon ausgegangen werden, dass zwei Flugzeuge trotz kreuzenden Rollwegen nicht im Konflikt zueinander stehen (z.B. durch ausreichend Abstand), muss keine solche Anweisung gegeben werden. Die Situation muss jedoch weiterhin beobachtet und bei Bedarf eingegriffen werden.
Für Inbounds gilt entsprechend das Gleiche. Sie werden rechtzeitig vor der Übergabegrenze vom Tower an Ground/Apron übergeben und erhalten dann ihre Rollanweisung zur geplanten Parkposition.
| Station | Phraseologie |
| **Pilot** | DLH5KC, request taxi. |
| **ATC** | DLH5KC, taxi to entry S8 via W2 D2 O2. |
| **Pilot** | Taxi to entry S8 via W2 D2 O2, DLH5KC. |
- Hinweis zur Taxi-Clearance: Die Phrase TAXI gibt es per Definition *nie* ohne ein direkt folgendes VIA oder TO.
- **TAXI VIA** bedeutet, "rolle über....". Eine Anweisung muss aber IMMER ein clearance limit beinhalten. Beginnst du also deine Anweisung mit TAXI VIA, so muss in der gleichen Anweisung immer ein HOLD SHORT kommen, dass das clearance limit beschreibt.
- **TAXI TO** bedeutet, "rolle zu...." und beschreibt damit das clearance limit, bis zu dem der Pilot rollen darf. Beginnst du deine Anweisung mit TAXI TO, so muss in der gleichen Anweisung immer ein VIA kommen, das dem Piloten die Route beschreibt.
#### Verkehr am Boden in Bewegung halten
- Es klingt banal, ist jedoch sehr effizient. Wenn die Flugzeuge erst einmal in Bewegung sind, sind sie schneller aus eurem Zuständigkeitsbereich als wenn sie stehen. Bei jedem Flieger, der anhalten muss, vergeht zusätzliche Zeit, er muss erneut angesprochen werden, um das Rollen fortzusetzen und kann unter Umständen auch mal vergessen werden. Bei viel Verkehr kann es somit schnell voll auf der Frequenz werden. Stattdessen sollten, wann immer möglich, give way Anweisungen gegeben werden oder auch mal das Routing am Boden geändert werden.
Daher sollte regeläßg gescannt werden: Hält gleich ein Flieger unnötig an? Das sollte vermieden werden.
#### Hold Short
Hold shorts werden verwendet, um rollenden Verkehr **vor** einem anderen Rollweg anzuhalten. Dabei gilt zu beachten, dass die weitere Rollführung nach dem hold short aufgehoben ist. Wenn der Flieger weiter rollen soll, muss ihm (erneut) die komplette weitere Route mitgeteilt werden. Ist es also absehbar, dass er der Flieger an einer Stelle warten muss, sollten ihm nur die bis dorthin notwendigen Rollwege gegeben werden.
| **ATC** | TUI4PH taxi to holding point runway 18 via L N1 N, hold short of N5. |
| **ATC** | TUI4PH continue taxi via N. |
| **ATC** | RYR1ME taxi to holding point runway 24 via B A A3, hold short of runway 14L. |
Soll eine Sequenz aus rollenden Fliegern an einem bestimmten Punkt anhalten, ist es ausreichend dem ersten Flieger den hold short zu geben. Alle folgenden Flugzeuge werden dahinter zwangsläufig anhalten müssen. Es ist jedoch wichtig zu beachten, dass sobald der erste Flieger erneut rollt, sich die komplette Sequenz wieder in Bewegung setzt.
Sollte der Weg zur aktiven Piste über eine andere Piste führen (z.B. in Köln und Hamburg), ist immer eine explizite Freigabe zum Überqueren dieser notwendig. Liegt die Piste außerhalb des eigenen Zuständigkeitsbereiches, muss ein hold short angewiesen werden.
#### Give Way
Eine weitere Möglichkeit, um potentielle Konflikte am Boden zu klären, ist die Verwendung der *give way Anweisung*. Dabei wird dem Piloten die Aufgabe übertragen, einem anderen, rollenden Verkehr Vorfahrt zu gewähren. Wichtig ist es dabei dem Piloten zu sagen, wo er den Kollegen vorbei lassen muss (at D3), auf was für einen anderen Verkehr er achten muss (company - Lufthansa A320) und von wo der Verkehr kommt.
| **ATC** | DLH5KC give way to company A320 crossing right to left on D3.
|
- #### Ground Status verwenden und Hold shorts Labeln
- Um selbst den Überblick zu behalten, aber auch anderen Lotsen die Möglichkeit zu geben, sich selbst schnell einen Überblick am Boden zu verschaffen, sind die Groundstates sehr hilfreich. Vorallem hohem Verkehrsaufkommen und vielen Lotsen am Platz, wenn mit verschiedenen Listen gearbeitet wird, sollten sie genutzt werden.
In dem Zusammenhang empfiehlt es sich bei viel Verkehr auch, gegebene Hold shorts als Tower oder Ground zu labeln. Dies verringert die Gefahr, dass man den Flieger vor einer Intersection vergisst, da das Hold Short recht präsent in der dritten Zeile im Label erscheint.
#### Intersection Departure
Auf Vatsim wird der Verkehr üblicherweise von Ground oder Apron auf die unterschiedlichen Intersections (Rollbahneinmündungen) der Pisten verteilt. Im Idealfall meldet der Pilot schon, wenn er bereit ist zum Rollen bzw. beim Initial Call für das weitere Rollen, von welcher Rollbahneinmündung er starten kann.
| **Pilot** | München Ground hallo, DLH5KC Entry S8, able B12. |
| **ATC** | DLH5KC, hallo, taxi to holding point runway 26L, intersecton B12, via B12. |
| **ATC** | DLH5KC, hallo (no benefit), taxi to holding point runway 26L via S and B13. |
Wenn es für den Tower (bzgl. der Abflugsequenz) oder den Piloten (z.B. Zeitersparnis) einen Vorteil mit sich bringt, können die Intersections vergeben werden. Es besteht jedoch keine Verpflichtung dafür, sodass der Pilot auch normal bis zum Anfang der Piste weiter genommen werden kann. Für den Piloten ist es immer sicherer, je mehr Piste er zur Verfügung hat. Muss er aufgrund von landendem Verkehr, Wirbelschleppenstaffelung oder allgemein wegen der Abflugsequenz noch länger auf den Start warten, sollte diese Zeit auch genutzt werden, um bis zum Pistenanfang weiter zu rollen.
Sollte die Nutzung einer Intersections nicht zu den veröffentlichten Standardverfahren eines Flughafens gehören (AIP), muss der Pilot immer zuvor gefragt werden, ob er die Intersection nutzen kann. Details dazu sind in der jeweiligen SOP des Flughafens zu finden.
| **ATC** | DLH5KC, advise able to depart from runway 26L, intersection B10.
|
Ebenfalls sollte man als Ground/Apron Lotse stets darauf achten, sich mit der Vergabe von der gleichen Intersection nicht seine Hauptrollwege zu blockieren, wenn man die Abflugsequenz des Towers nicht kennt (z.B. Rollweg L in Frankfurt). Im Zweifel sollte man mit dem Tower koordinieren oder ein möglichst frühzeitiges Handoff geben, sodass sich der Tower bei Bedarf den Flieger selbst in die Intersection nehmen kann.
#### Geänderte Rollführung
Vor allem auf großen Flughäfen verändert sich die Verkehrssituation am Boden kontinuierlich. Aus diesem Grund kann es sein, dass auf der dem Piloten mitgeteilten Route nun ein potentieller Konflikt vorliegt oder längere Wartezeiten notwendig werden (z.B. durch einen Pushback). Hierbei kann der Lotse neben den bereits bekannten Anweisungen auch die Route des Fliegers am Boden ändern.
| **ATC** | DLH5KC revision, continue via W2, hold short of D4. |
#### Übergabe von Flugzeugen
Wann findet eigentlich die Übergabe eines Flugzeuges zwischen zwei Bodenstationen statt?
Salopp gesagt: Gib deine Flieger ab, wenn du sie nicht mehr brauchst. Präziser: Piloten sollen an die nächste Position abgegeben werden, wenn...
1. ...sie eine Freigabe bis zum Übergabepunkt zur nächsten Station haben (in Nürnberg bis zum Holding Point, in München auf Apron bis zum Entry)
2. ...sie **konfliktfrei** sind (das heißt, dass es keine ungelösten Kreuzungen mit anderen Fliegern gibt)
3. ...du ihnen keine weitere Anweisungen mehr geben musst
Sind alle drei Punkte erfüllt dann heißt es: Contact XYZ Ground/Apron/Tower on 1xx.xxx.
Es sollte auf jeden Fall vermieden werden, dass Flieger unnötig anhalten müssen, weil vergessen wurde, sie z.B. zum Tower zu übergeben. Auch hier sollte regelmäßig der Airport gescannt werden, ob Flugzeuge übergeben werden können.
### Fortgeschrittene Rollführung
Vor allem bei viel Verkehr am Boden ist es von Bedeutung, effizient zu arbeiten und die Frequenzbelastung möglichst gering zu halten. Wichtig ist es dabei, den Verkehrsfluss aufrecht zu erhalten, unnötige Wartezeiten und Funksprüche zu reduzieren (wenig hold shorts, kurze und prägnante Anweisungen, frühe Handoffs) und die Sicherheit dennoch zu gewährleisten. Anbei ein paar Tipps, die das Arbeiten erleichtern können.
*HINWEIS: Nutzt diese Verfahren nur wenn ihr euch damit vertraut fühlt und dies handhaben könnt! Es kann zudem immer sein, dass ein Pilot euren Anweisungen nicht genau versteht und auch nicht nachfragen wird.*
#### Push and Pull
Es muss nicht immer nur das klassische Zurückdrücken sein, vor allem Piloten mit X-Plane sind einfach in der Lage auch nach vorne zu ziehen und den Schlepper an einem bestimmten Punkt abzuhängen. Dies bietet sich z.B. an, wenn zwei Flieger nebeneinander pushen oder man den Rollweg zeitnah für einen anderen Flieger frei machen möchte.
| **ATC** | DLH123, pushback approved, then pull foreward, disconnect (tug) short of D2 / abeam stand 217. |
#### Conditional Pushback
Wie auch bei den Give Way Anweisungen, kann die Verantwortung auf den Piloten übertragen werden. Dies bietet sich vor allem an, wenn der Outbound auf einen weiteren Flieger warten muss, der zunächst hinter ihm passieren muss. Wichtig ist dabei immer zu beachten, dass die Anweisung eindeutig sein muss und Missinterpretation ausgeschlossen sind.
| **ATC** | DLH123, when clear of outbound company A320 behind, pushback approved. |
| **ATC** | DLH123, when space permits, pushback approved. |
| **ATC** | DLH123, when clear of the inbound British Airways A319 for V117, pushback approved, orange line, facing west. |
#### Intersections First
Flieger, die eine Piste verlassen bzw. kreuzen, sollten, wenn möglich, priorisiert behandelt werden. Dies ermöglicht dem Tower, Flieger effizienter und mit weniger Wartezeiten für Outbounds die Piste überqueren zu lassen.
| **ATC** | DLH123 give way to the vacating Condor A320 from runway 25C. |
| **Pilot** | Giving way to the vacating traffic, DLH123. |
| **ATC** | CFG789 number one, taxi right via L, hold short of N8. |
#### Richtungsangaben geben
Wenn es schnell gehen soll oder der Pilot mit dem Flughafen nicht vertraut ist, ist es immer hilfreich dem Piloten mitzuteilen, ob er nach links oder rechts auf einen Rollweg drehen soll (left, right, straight ahead).
| **ATC** | DLH123, taxi right on L, hold short N8. |
### Backtrack
Das Backtrack (dt. Zurückrollen) beschreibt ein Verfahren, bei dem ein Flieger von einer Rollbahneinmündung entgegen der Pistenrichtung auf die Piste rollt, anschließend auf der Piste bis zum Pistenanfang rollt und dort wendet, sodass er vom Pistenanfang starten kann. Das Verfahren wird insbesondere dort angewandt, wo es keinen regulären Rollweg gibt, der zum Pistenanfang führt, oder wo der Rollweg nicht für bestimmte Flugzeugtypen zugelassen ist.
Zu beachten ist, dass in dieser Zeit die Piste nicht für andere Flugbewegungen (Starts / Landungen) genutzt werden darf. Daher sollte der nächste Anflug noch deutlich weiter weg sein als bei einem "normalen" Lineup, je nachdem wie lang das Backtrack-Procedure dauert. Details dazu finden sich in den SOPs der entsprechenden Flughäfen.
| Backtrack |
| **English** | **German** |
| DLH5EJ, backtrack approved, line up runway 03 | DEEZU, Zurückrollen genehmigt, rollen Sie zum Abflugpunkt Piste 03 |
# Prioritäten - Ground & Tower
Um einen sicheren und reibungslosen Flugbetrieb zu ermöglichen, ist es wichtig effizient und sicher zu arbeiten. Wichtig ist es dabei immer **vorausschauend** zu arbeiten und nicht dem Verkehr nachzuarbeiten. Dazu gehört es u.a. auch über den eigenen Bereich hinaus zu schauen, was z.B. der Kollege auf der benachbarten Position macht.
Für eine sichere und effiziente Durchführung des Flugverkehrs ist daher das richtige Setzen von Prioritäten unerlässlich. Dies hilft dem Lotsen sich zu fokussieren und die Kontrolle über den Flughafen zu behalten. Dabei sollte man sich an den folgenden Prioritäten orientieren:
1. Notfall (Emergency)
2. Fliegender Verkehr (Lande- und Startfreigaben)
3. Die Piste betreffende Freigaben (Line-Up / RWY Crossings)
4. Rollender Verkehr (möglich nicht unnötig irgendwo anhalten lassen)
5. Pushbacks
6. Startup/Enroute Freigaben
7. Sonstiges
Grob gesagt kann man sich merken: "Fliegend vor rollend vor stehend".
Die Prioritäten sind vor allem bei zeitkritischen Anweisungen wichtig, wo es auf wenige Sekunden ankommen kann (z.B. bei der Landefreigabe im kurzen Endanflug). Die Prioritäten helfen ebenfalls dabei die eigene Kapazität und Effizienz am Flughafen zu gewährleisten und zu volle Frequenzen zu vermeiden.
##### Standbys geben und labeln
Bei viel Verkehr ist es aus den oben genannten Gründen überhaupt keine Schande, wenn gerade die unwichtigeren Sachen wie Streckenfreigaben auch mal ein paar Minuten auf Standby gesetzt werden. Dann kann man dem Piloten etwas sagen wie "*DLH123, standby, number 2 for clearance*". Auch aus anderen Gründen kann ein Standby sinnvoll sein, z.B. weil der Pushback aufgrund von anderem Verkehr noch nicht gegeben werden kann: "*DLH123, standby for pushback due to traffic*".
Um nun einen Überblick zu behalten, welchen Fliegern man ein Standby gegeben hat, kann man zumindest für die Outbounds die Request-Spalte in der Startup- oder Departure-Liste nutzen, um so Standbys zu markieren und sie sich nicht merken zu müssen. Ruft z.B. ein Flieger für Pushback oder die Streckenfreigabe rein und diese kann aus welchen Gründen auch immer noch nicht gegeben werden, so geht man auf die entsprechende Zeile, klickt die REQ-Spalte an und geht dann auf die entsprechende Freigabe. Anschließend sieht man in gelb z.B. "R1P". Dabei steht das "R" für Request, die Zahl dafür, an wievielter Stelle der Flieger dran ist (also z.B. 2, wenn noch ein Flieger vor ihm den gleichen Standby hat) und das "P" für die Art des Requests (C = Clearance, P = Pushback, T = Taxi usw.).
Optional kann man noch die Timer-Spalte einblenden, indem man oben links in der Liste Rechtsklick auf das "O" macht und dann "Timer" aktiviert. Dann sieht man, wie lange ein Flieger schon wartet.
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-8.png)
Schließlich sollte man sich nur noch angewöhnen, auch regelmäßig in die REQ-Spalte zu schauen, sodass man im Optimalfall nie wieder Standbys vergisst.
# Effizienz im Towerbereich
- #### Abflugsequenz optimieren
- Ein entscheidender Punkt, wo viele wertvolle Sekunden verschwendet werden können, ist die Abflugsequenz. Vor allem bei viel Verkehr und engen Lücken ist es wichtig, den Verkehr so zügig wie möglich in die Luft zu bekommen. Versucht dabei so gut wie möglich an die notwendige Staffelung zu kommen, um keinen zu großen Lücken zu verursachen. Wartet man z.B. nur eine Minute zu lang, hat man die Abflugkapazität des Flughafens um bis zu 50% reduziert. Um die effiziente Staffelung zu ermöglichen, ist es ggf. auch notwendig die Abflugsequenz anzupassen, sodass die Flieger nicht in der der Reihnfolge abheben, wie sie beim Tower gerufen haben. Dafür können an vielen Flughafen verschiedene Intersections genutzt werden. Lücken auf der Frequenz können für konditionelle Line-Up Freigaben genutzt werden.
Aus folgenden Gründen kann es Sinn machen, vom "First come, first served"-Prinzip abzuweichen:
**Wirbelschleppenstaffelung**
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-5.png)
Im Bild haben wir folgende Konstellation: Zur Piste rollt vorne ein Heavy, danach noch ein Heavy, am Ende ein Medium. Wenn die Flieger jetzt in dieser Reihenfolge starten, braucht man zwischen den ersten beiden Heavies 4 NM und zwischen dem zweiten Heavy und dem Medium 5 NM. Insgesamt also 9 NM.
Wenn wir nun aber den Medium vorziehen und ihn zum Beispiel von der Intersection L4 als Nummer 1 starten lassen, so brauchen wir zwischen dem Medium und dem Heavy nur 3 NM und zwischen den beiden Heavies wieder 4 NM. Insgesamt somit 7 NM. Damit haben wir direkt 2 NM gespart - das ist eine knappe Minute.
Fazit: Wenn Medium und Heavy relativ zeitgleich an der Bahn ankommen, sollte man versuchen, den Medium vorzuziehen, um den geringsten durchschnittlichen Delay zu erzeugen. Dabei sollte man nach Sinn und Verstand handeln und einen Heavy nicht mehrere Minuten lang stehen lassen, nur um ein paar Mediums vorher rauszubekommen.
**Verschiedene SIDs mischen**
Wie du im Artikel [Staffelung im Towerbereich](https://knowledgebase.vatsim-germany.org/books/praktische-verfahren/page/staffelung-im-towerbereich "Staffelung im Towerbereich") gelernt hast, brauchst du zwischen gleichen SIDs in der Regel 5 NM Spacing. Bei verschiedenen SIDs reichen 3 NM Radarstaffelung aus.
Angenommen du hast die Konstellation, dass z.B. zwei Flieger mit der gleichen SID nach Norden zur Piste rollen und dahinter ein Flieger mit einer anderen SID nach Süden zur Piste rollt. Wenn du nun in der Reihenfolge Takeoff gibst, brauchst du zwischen den gleichen SIDs 5 NM und zwischen der Nord- und Süd-SID 3 NM. Also insgesamt 8 NM Abstand. Wenn du aber nun den Flieger mit der Süd-SID zwischen die beiden Nord-SID packst, so musst du jeweils nur 3 NM warten, das ergibt also insgesamt 6 NM Abstand. Somit muss zwar ein Flieger etwas länger warten, aber ein anderer kann wesentlich schneller dafür raus und du hast im Durchschnitt 2 NM und somit auch Zeit gespart.
**Starke Performance-Unterschiede**
Angenommen du hast eine C172 IFR an einer Intersection stehen und eine Boeing 777 am Pistenanfang. Oben hast du gelernt, dass man versuchen sollte, Wirbelschleppenstaffelung zu vermeiden. Also zieht man nun die C172 vor die B777? Wenn wir das so machen würden, könnte die B777 natürlich 3 NM hinter der C172 in die Luft gehen, da wir nur die Radarstaffelung benötigen. Aber in dem Fall sind die Performance-Unterschiede so groß, dass die B777 die C172 binnen weniger Sekunden sowohl von der Geschwindigkeit als auch von der Höhe eingeholt hat. Somit kommt es trotz initialer Staffelung schnell zu einer Staffelungsunterschreitung. Daher müsste man in so einer Konstellation, je nachdem, wann die Flugwege der C172 und B777 sich trennen, teils mehrere Minuten warten, bis die C172 aus dem Initial climb der B777 raus ist oder 3 NM Abstand zur SID der B777 hat, sodass Staffelung sichergestellt ist.
In so einem Fall ist es also sinnvoller, vorne die B777 starten zu lassen und danach mit 6 NM Wirbelschleppenstaffelung die C172.
Wann die Performance-Unterschiede den Faktor Wirbelschleppenstaffelung überwiegen, hängt sehr von der Konstellation der Flugzeuge ab. Generell kann man sagen, dass alle Jet-Airliner eine ähnliche Performance zumindest in Bezug auf die Geschwindigkeit im Steigflug haben, wohingegen Props oft deutlich langsamer sind. Das muss aber nicht immer gelten. Im Zweifelsfall: Lieber etwas zu lang als zu kurz warten.
- #### Fehlanflüge vermeiden
- Wenn die Gefahr besteht, dass die notwendige minimale Staffelung unterschritten wird, muss der Lotse handeln. Neben der Option des [Durchstartens ](https://knowledgebase.vatsim-germany.org/books/praktische-verfahren/page/fehlanflug-lotsenguide "Fehlanflug - Lotsenguide")sollte man sich aber auch um die möglichen Alternativen Gedanken machen. So können an internationalen Verkehrsflughäfen (EDDx) bspw. Geschwindigkeitsanweisungen gegeben werden, um eine Staffelungsunterschreitung zu vermeiden. Wenn dahinter allerdings noch ein Flieger beim Approach-Lotsen ist, muss das vorher abgesprochen werden. Auch kann bei entsprechenden Bedingungen die [reduzierte Pistenstaffelung ](https://knowledgebase.vatsim-germany.org/books/staffelung/page/reduced-runway-separation-rrs "Reduced Runway Separation (RRS)")angewendet werden.
#### Handling von engen Situationen
Ein paar Fragen, die sich die meisten Towerlotsen sicherlich schon einmal gestellt haben, inklusive einiger Denkanstöße (am Beispiel einer 4 km langen Piste):
**Was ist der letzte Moment, in dem ich einem Flieger Takeoff geben kann, wenn sich ein Inbound nähert?**
Bei dieser Frage gehen wir davon aus, dass der Flieger schon auf der Piste steht. Eine Angabe in Form von "Bei X NM Final muss spätestens die Takeoff-Freigabe erfolgen" ist schwierig, da die Antwort auf die Frage im Wesentlichen von zwei Faktoren abhängt:
1. Die Geschwindigkeit des Inbounds im letzten Teil des Endanflugs (ein langsamer Flieger braucht im 3 NM Final noch wesentlich länger bis er die Pistenschwelle überfliegt als ein schneller Flieger)
2. Die Trägheit und Geschwindigkeit des Outbounds (Eine Boeing 747 braucht vom Moment der Startfreigabe einige Sekunden länger bis sie auch tatsächlich losrollt als zum Beispiel ein CRJ9)
Als Faustformel kann man sagen, dass die meisten Airliner vom Beginn des Startlaufs bis zum Überfliegen des Pistenendes bei einer 4 km langen Piste ca. 1:05 - 1:15 Minuten brauchen. Das heißt, der Inbound sollte in dem Fall noch etwas mehr als 1 Minute bis zum Überfliegen der Pistenschwelle brauchen, damit normale Pistenstaffelung gegeben ist. Reduzierte Pistenstaffelung (2.400m), wie sie bei gutem Wetter und entsprechenden Markierungen angewandt werden darf, ist meistens sogar schon nach ca. 45 Sekunden erreicht.
Wenn man jetzt noch die Zeit zwischen Aussprechen der Takeoff-Clearance und Beginn des Startlaufs (ca. 3 - 10 Sekunden) mit einbezieht, heißt das: Die Takeoff-Clearance sollte für normale Pistenstaffelung gegeben werden, wenn der Inbound noch etwas mehr als eine Minute bis zur Pistenschwelle braucht (bezogen auf eine 4km Piste; bei einer 3 km Piste hingegen kann man nochmal entsprechend ca. 10 Sekunden abziehen). Für reduzierte Pistenstaffelung (2.400m) reicht es auch, wenn der Inbound gerade so noch eine Minute braucht - das ist dann aber wie im Bild unten sehr auf Kante genäht und es muss umso mehr beobachtet werden, dass der Outbound auch wirklich losrollt.
Woher weiß ich aber nun, wie lange der Inbound von seiner aktuellen Position bis zur Pistenschwelle braucht? Zwei Möglichkeiten:
1. Rechnen: Ein Inbound, der genau 120 Knoten GS fliegt, fliegt somit 120 NM / Stunde, also 2 NM pro Minute. Sprich, im 2 NM Final braucht er noch eine Minute. Ein Inbound, der 150 Knoten GS fliegt, fliegt somit 150 NM / Stunde, also 2,5 NM pro Minute. Sprich, im 2,5 NM Final braucht er noch eine Minute. Alles dazwischen muss dann im Kopf grob interpoliert werden
2. Speedvektor auf eine Minute anschalten (im Euroscope über die oberste Zeile): Wenn der Minutenvektor die Pistenschwelle penetriert, ist es noch genau eine Minute, bis der Inbound diese überfliegt. Der Startlauf sollte ein paar Sekunden vorher bereits für normale Pistenstaffelung begonnen worden sein; andernfalls wird es "nur" die herabgesetzte Pistenstaffelung
[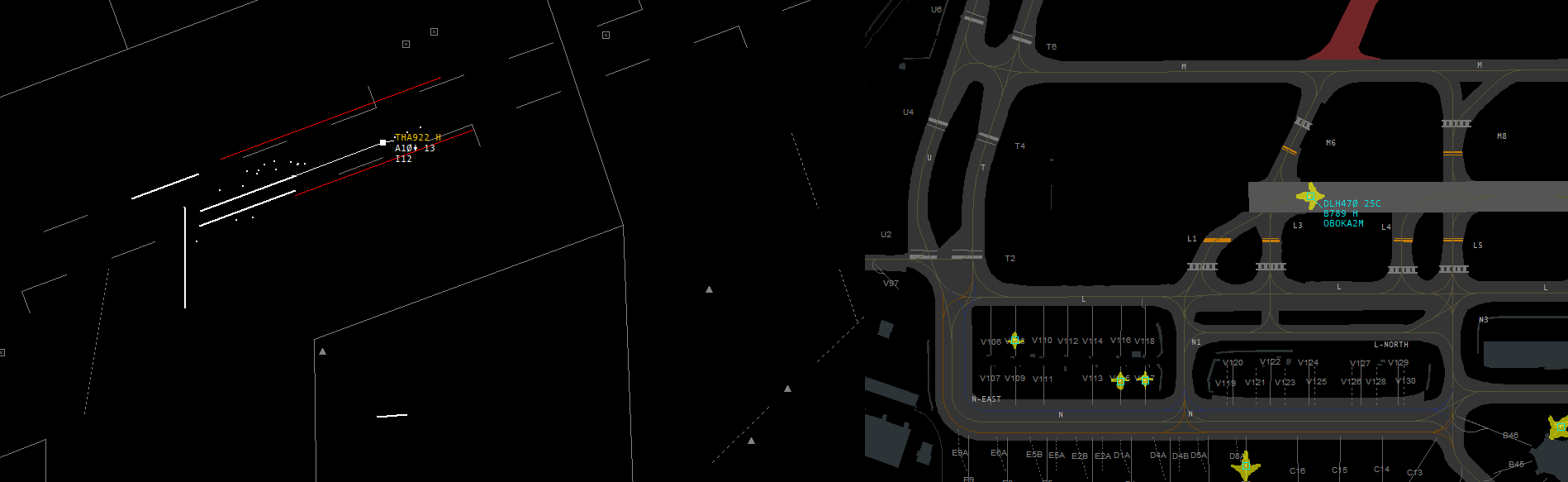](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-6.png) *THA922 braucht hier gemäß dem Speedvektor noch 1 Minute bis zur Pistenschwelle, d.h. DLH470 muss in den nächsten Sekunden den Startlauf beginnen, damit wir Reduced Runway Separation haben. Normale Pistenstaffelung wird es jetzt aber schon nicht mehr, dafür müsste die Thai noch etwas mehr als 1 Minute weg sein*
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-7.png) *Ergebnis: Mit einigen Hundert Metern Puffer haben wir Reduced Runway Separation (Die 2.400m-Markierung ist auf Höhe L14)*
**Und wenn der Flieger noch am Rollhalt steht?**
Hier muss zu den oben genannten Mindestzeiten noch die Zeit für den Lineup addiert werden. Das kommt sehr auf die Art der Intersection an (90-Grad-Intersection vs. High-Speed-Turnoff-Intersection wie in EDDM), außerdem auf den Flugzeugtyp. Auch beim Lineup ist eine B748 viel träger als ein kleiner A320. Schaut euch bei Gelegenheit selber mal für euren Flughafen typische Lineup-Zeiten an. Im ungünstigsten Fall (träger Flieger, 90-Grad-Intersection) kann das ca. 60 Sekunden dauern, im besten Fall (agiler Flieger, angewinkelte Intersection) sind sportliche Piloten schon nach 20 Sekunden in der Line-up-Position. Irgendwo dazwischen liegt dann der Durchschnitt. Demzufolge kann man grob sagen, wenn der Inbound noch ca. 2 Minuten von der Pistenschwelle entfernt ist, kann man vom Rollhalt aus, wenn man den Piloten entsprechend anheizt (siehe unten), Lineup und Takeoff geben und erhält meist die normale Pistenstaffelung. Auch hier kann man entweder rechnen oder sich den 2-Minuten-Speedvektor einblenden lassen, um zu wissen, wo der Inbound in 2 Minuten sein wird.
**Und wie groß muss die Lücke zwischen zwei Inbounds sein für einen Outbound dazwischen?**
Hier kommt dann neben allen oben bereits genannten Faktor noch ein weiterer hinzu: Die Verfügbarkeit und Art der Runway-Exits. Denn in so einer Konstellation ist der limitierende Faktor, bevor man dem Outbound Takeoff geben kann, meist, dass der erste Inbound erstmal runter von der Piste muss. An Flughäfen wie München oder Frankfurt mit vielen verfügbaren High-Speed-Turnoffs liegt die Zeit zwischen Überfliegen der Pistenschwelle und Verlassen der Piste unter guten Umständen bei ca. 45 Sekunden. Schwere Flieger brauchen etwas länger als 60 Sekunden. Auf Vatsim kommt der Faktor Pilotenqualität hinzu - hier sollte man, wenn man den Piloten nicht genau einschätzen kann, eher konservativ rechnen und von 1 - 1,5 Minuten Bahnbelegungszeit ausgehen.
In dieser Zeit hat der Outbound in der Regel schon das Lineup beendet und kann danach die Startfreigabe erhalten. Dann gelten wieder die gleichen groben Werte wie schon oben erläutert.
Wenn man nun also die beiden Werte - Bahnbelegungszeit des ersten Inbounds + Zeit vom Takeoff bis Überfliegen des Pistenendes vom Outbound addiert, kommt man auf etwa 2 Minuten (sportlich) bis 2,5 Minuten (konservativ). Das heißt, der hintere Inbound sollte, wenn der vordere über der Pistenschwelle ist, noch 2 - 2,5 Minuten von der Pistenschwelle entfernt sein. Je nach Wind und Flugzeugtyp entspricht das also etwa einer **Lücke von etwa 5 - 6 NM bei Touchdown**. In den meisten SOPs wird daher auch bei Starts und Landungen auf die gleiche Piste empfohlen, 6-Meilen-Lücken zwischen den Inbounds zu machen, sodass jeweils ein Outbound dazwischen raus kann. Nun kennt ihr auch den theoretischen Hintergrund dazu.
**Wie kann ich auf der Frequenz die Chancen erhöhen, dass eine enge Situation sich ausgeht?**
Dazu habt ihr glücklicherweise eine Reihe an phraseologischen Werkzeugen, welche ihr situativ nutzen könnt und sollt.
Soll ein Inbound die Piste schnell verlassen?
> "DLH4JA, after landing expedite vacating, wind 280 degres, 5 knots, runway 25C cleared to land"
Ein Outbound soll darauf vorbereitet werden, schnell zu starten?
> "DLH3CN, prepare for immediate departure (as soon as runway is clear)"
Anschließend:
> "DLH3CN, wind 280 degrees 5 knots, runway 25C, cleared for immediate takeoff"
Knapp vor einem Inbound startet noch ein Outbound?
> "CFG4MA, reduce to final approach speed, expect late clearance, traffic, A320 departing ahead"
- "Reduce to final approach speed" darf dabei nur gegeben werden, wenn dahinter kein Flieger ist, wodurch die Staffelung in Gefahr wäre. Andernfalls muss es vorher mit Approach abgesprochen werden
- Das Geben der Verkehrsinformation hat den Vorteil, dass im Falle von herabgesetzter Pistenstaffelung die notwendige Verkehrsinformation schon bereits gegeben wurde
- "Expect late clearance" sorgt dafür, dass der Pilot nicht schon im 2 NM Endanflug nach seiner Landefreigabe fragt
# Nicht Zurückhalten einer Start- bzw. Landefreigabe
Dieses Verfahren ist kein verpflichtender Bestandteil der S1-Ausbildung.
#### Einführung
Eine Start- bzw. Landefreigabe kann unter gewissen Umständen auch dann schon erteilt werden, wenn die Piste noch nicht frei ist. Es muss jedoch **ausreichende Gewissheit** darüber bestehen, dass die Piste frei sein wird, sobald der **Inbound die Pistenschwelle überfliegt** oder der **Outbound den Startlauf beginnt**.
Dieses Verfahren kann die Frequenzbelastung reduzieren und die Effizienz auf der Frequenz vor allem bei hohem Verkehrsaufkommen erhöhen. Eine Anwendung dieses Verfahrens setzt allerdings ein hohes Maß an Kenntnis und Erfahrung voraus.
Die Krux an der Sache ist die Vorgabe, dass "ausreichenden Gewissheit" bestehen muss, dass die Piste frei sein muss, sobald die Start- oder Landefreigabe ihre Wirkung entfacht. Der Ausdruck "ausreichende Gewisseheit" bietet natürlich einen großen Interpretaionsspielraum. Empfehlenswert ist es im Sinne der Sicherheit, die in der Flugsicherheit trotz allem an oberster Stelle steht, für das eigene Mindset das Wort "ausreichend" möglichst zu Streichen und das Verfahren nur anzuwenden, wenn "Sicherheit" besteht, dass die entsprechenden Bedingungen zum nötigen Zeitpunkt erfüllt sind.
#### Startfreigabe
**Situation (A)**: Ohne das in diesem Artikel beschriebene Verfahren darf ich zu diesem Zeitpunkt keine Startfreigabe erteilen, da GRÜN das Bahnende noch nicht überflogen hat und die Piste daher noch belegt ist. Jetzt kommt aber die Erwägung der "ausreichenden Sicherheit" ins Spiel. Als Lotse kann ich damit zum Zeitpunkt der Situation A die Startfreigabe erteilen, wenn ich "ausreichende Gewissheit" darüber habe, dass GRÜN bereits das Bahnende überflogen haben wird und die Startbahn frei sein wird, wenn BLAU den Startlauf beginnt. Diese Situation ist dann bildlich in **Situation (B)** dargestellt.
[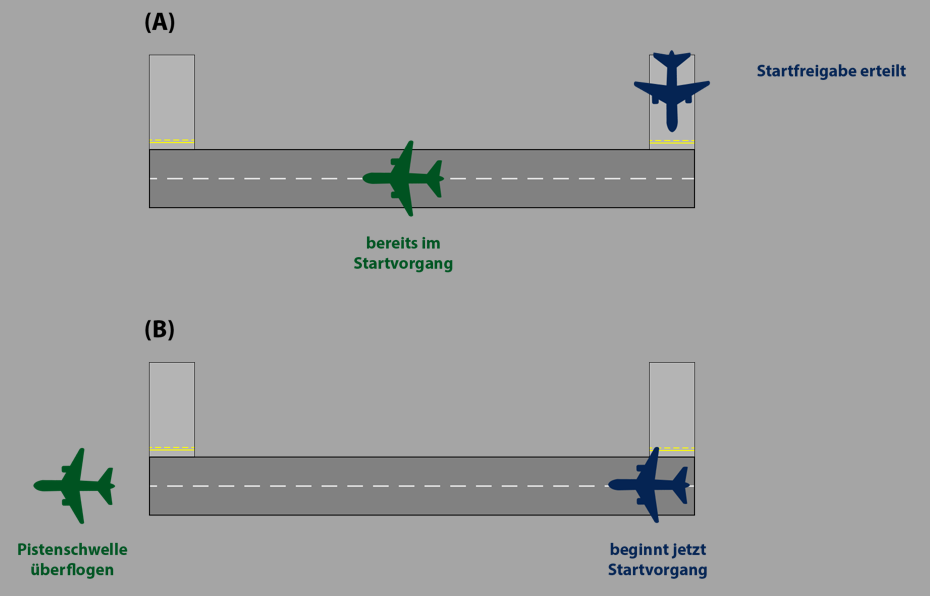](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-11/atd-nichtzuruckhalten-start-v2.png)
Dieses Verfahren kann auch unter [reduzierter Pistenstaffelung](https://knowledgebase.vatsim-germany.org/books/staffelung/page/reduced-runway-separation-rrs "Reduced Runway Separation (RRS)") (RRS) angewendet werden. Wirbelschleppen- und/oder Radarstaffelung müssen trotzdem eingehalten werden, sofern erforderlich.
#### Landefreigabe
**Situation (A):** Ohne das in diesem Artikel beschriebene Verfahren wäre eine Landefreigabe nicht möglich, da die Piste noch durch das landende Flugzeug GRÜN blockiert ist. Als Lotse kann ich jedoch bei Anwendung des "Nicht-Zurückhaltens einer Landefreigabe" die Landung freigeben, wenn ich "ausreichende Gewissheit" darüber habe, dass GRÜN bereits die Piste verlassen haben wird und die Startbahn somit frei sein wird, wenn BLAU die Landebahnschwelle überfliegt. In **Situation (B)** ist das vorher beschriebene eingetreten und das Verfahren wurde korrekt angewendet. Aus den unter "Startfreigabe" genannten Gründen ist es allerdings schwer beim Verlassen eines Flugzeuges das Tempo vorherzusagen und somit "ausreichende Gewissheit" zu erreichen.
[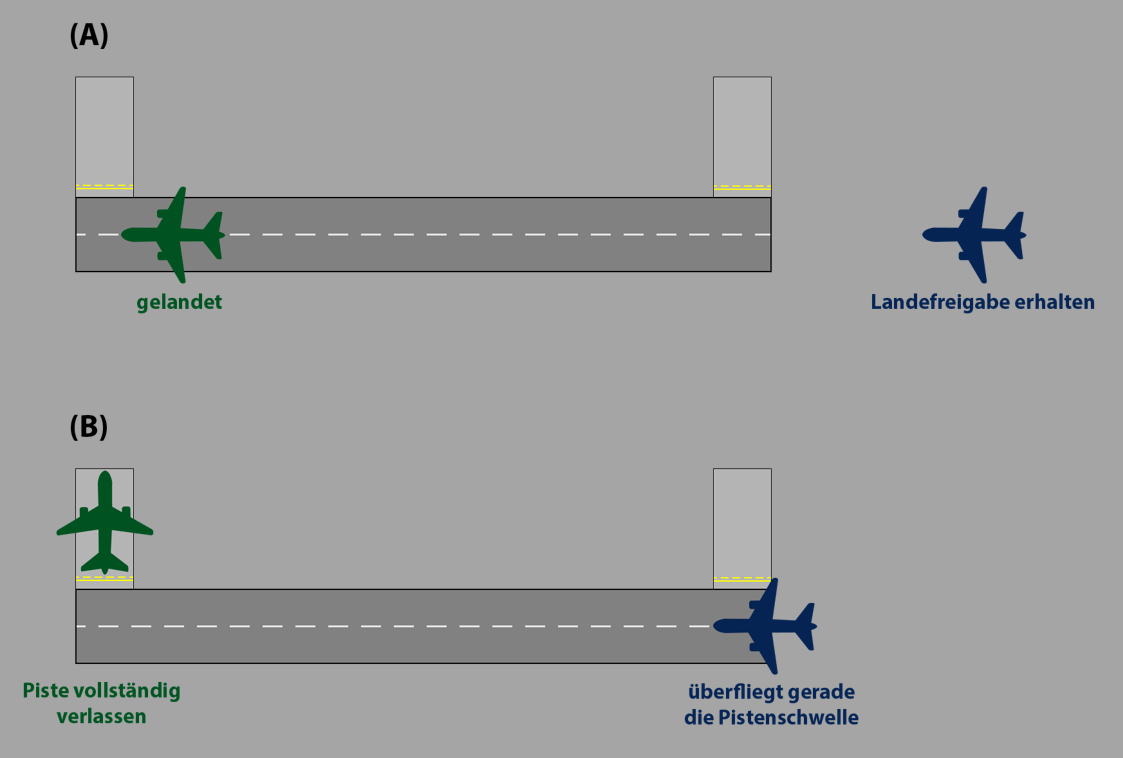](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-11/atd-nichtzuruckhalten-landung-v2.png)
Das Verfahren kann auch verwendet werden, wenn vor dem landenen Verkehr ein Abflug stattfindet. Ist dieser abgehoben, so kann relativ gut mit "ausreichender Sicheheit" vorhergesagt werden, ob die Piste frei sein wird, wenn der Anflug die Pistenschwelle überfliegt. In diesem Fall darf dann also die Landefreigabe schon gegeben werden, bevor der Abflug das Bahnende überflogen hat, sofern beim Überfliegen der Bahnschwelle des Anflugs die Piste frei sein wird.
Dieses Verfahren kann auch unter reduzierter Pistenstaffelung (RRS) angewendet werden. Wirbelschleppen- und/oder Radarstaffelung müssen trotzdem eingehalten werden, wenn es erforderlich ist.
#### Phraseologie
An der Phraseologie ändert sich nichts im Vergleich zur "normalen" Start- und Landefreigabe. Eine Verkehrsinformation ist bei Anwendung des Verfahrens nicht vorgeschrieben. Wie immer kann aber eine Verkehrsinformation zu einem besseren Situationsbewustsein auf Piloten- und Lotsenseite beitragen.
#### Beispiele
Das Verfahren dient vor allem dem Zweck, die Frequenz vor allem bei viel Verkehr effizienter zu nutzen und z.B. einen zweiten unnötigen Funkspruch zu verhindern.
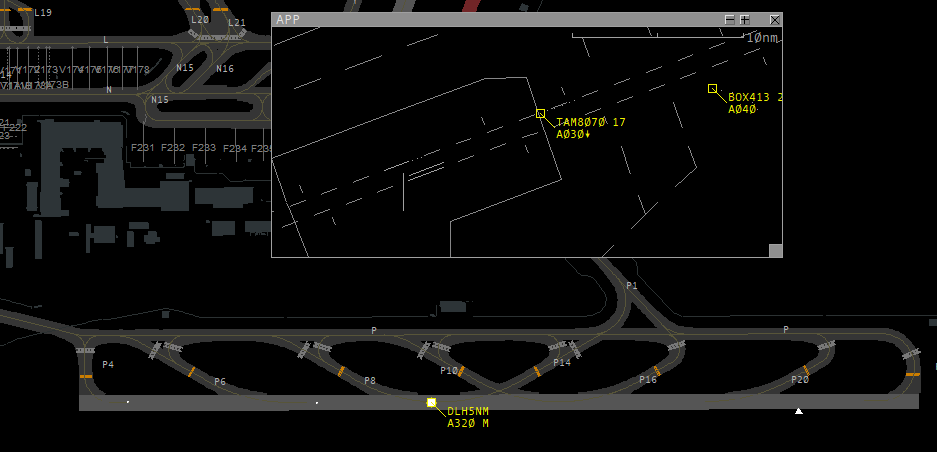
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-9.png)
Beispiel 1 (siehe Bild): DLH9AX steht am Rollhalt und meldet, dass er ready ist. Der vorherige Abflug ist airborne und wird in ca. 10 Sekunden das Pistenende überflogen haben. Dank dieses Verfahrens kann ich direkt die Takeoff-Freigabe geben, obwohl zu dem Zeitpunkt ja noch keine Pistenstaffelung besteht. Ich habe nämlich ausreichende Gewissheit darüber, dass die Pistenstaffelung zu dem Zeitpunkt bestehen wird, wenn der hintere Flieger seinen Startlauf beginnt, da zwischen der Lineup-Anweisung und dem Beginn des Takeoffs mit ausreichender Sicherheit mehr als 10 Sekunden liegen werden.
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-03/screenshot-10.png)
Beispiel 2 (siehe Bild): TAM8070 meldet sich im 8 NM Endanflug. Die vorherige Landung ist gelandet und rollt gerade auf der Piste aus. Dank dieses Verfahrens kann ich direkt mit dem Initial Call zum reinrufenden Inbound die Landefreigabe geben, obwohl zu dem Zeitpunkt ja noch keine Pistenstaffelung besteht. Ich habe nämlich ausreichende Gewissheit darüber, dass die Pistenstaffelung zu dem Zeitpunkt bestehen wird, wenn der hintere Inbound die Pistenschwelle überfliegt, da dieser noch ca. 3 Minuten bis zur Piste braucht und der vordere Inbound gleich die Piste verlassen wird.
Natürlich muss ich als Lotse die Situation dennoch beobachten, sollte aus irgendeinem Grund die Staffelung doch nicht gegeben sein, muss ich die Freigabe zurückziehen.
**Das Verfahren sollte nicht in engen Situationen verwendet werden** (z.B. wenn der hintere Inbound schon im short final ist und der vordere Inbound noch nicht ganz die Piste verlassen hat) - hier besteht nämlich **keine** ausreichende Gewissheit über die Staffelung zum Zeitpunkt des Schwellenüberflugs. Stattdessen sollte mit der Landefreigabe gewartet werden, bis die Piste auch tatsächlich frei ist.
# Konditioneller Lineup
##### Einführung
Auf allen Lotsenstationen ist es enorm wichtig, dass die Frequenz möglichst effizient genutzt wird. Wir können möglicherweise im Kopf zwei Dinge gleichzeitig bedenken und bearbeiten, wir können allerdings nicht zwei Anweisungen an verschiedene Flugzeuge zur gleichen Zeit auf der Frequenz geben. Daher ist es ratsam, Transmissions vorzuverlegen, um später Zeit für andere Transmissions zu haben. Eine ideale Möglichkeit bietet dafür die konditionelle Lineup Freigabe. Damit delegierst du die Freigabe an den Piloten und weist ihn an, nach einem bestimmten Verkehr auf die Piste zu rollen.
Wichtig ist es dabei, dem Piloten immer mitzuteilen, um welchen Verkehr genau es sich handelt! Ebenso müssen gute Sichtbedingungen vorherrschen, sodass der Pilot den anderen Flieger auch sehen kann. Bei schlechteren Wetterbedingungen oder einem ungünstigen Winkel der Intersection (spitzer als 90°), muss der Pilot zunächst gefragt werden, ob er den genannten Verkehr in Sicht hat.
Gedacht ist dieses Verfahren - wie schon oben erwähnt - um Lücken auf der Frequenz besser zu nutzen und somit die Effizienz zu erhöhen. Zu beachten ist, dass die konditionelle Freigabe deutlich länger ist und mehr Zeit in Anspruch nimmt. Das führt je nach Verkehrssituation auch dazu, dass ein normaler Lineup deutlich effizienter sein kann. Ist z.B. zu erwarten, dass bei Ende der Konversation der landende Verkehr bereits die Pistenschwelle überflogen hat oder ein anderer bereits den Startlauf begonnen hat, ist ein normaler Lineup oft besser geeignet.
##### Bei Abflügen
Bei hohem Verkehrsaufkommen kann es je nach Flughafen sehr wichtig sein, eine effiziente Staffelung der Abflüge zu erreichen und keine Zeit zu verlieren. Um dies zu ermöglichen, sollten die Outbounds zügig mit dem Lineup beginnen, sobald dies möglich ist. Hier kann der Lotse gut vorarbeiten und entsprechend seiner geplanten Abflugsequenz die Flieger auf die Piste führen. Mehrere konditionelle Freigaben gleichzeitig sind nur dann möglich, wenn es sich bei den restriktierenden Flieger um den nächsten am Flugzeug vorbeirollenden Flieger handelt. Im untenstehenden Beispiel wird dies noch weiter erläutert.
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-10/atd-condinional-lineup.png)
*Beispiel konditionaller Lineup in Frankfurt Piste 25C (für Vollbild klicken)*
| Station | Phraseologie |
| **ATC** | DLH720, **after** departing Boeing 777, lineup runway 25C **behind**, number 3 for departure. |
| **Pilot** | **After** departing Boeing 777, lining up runway 25C **behind**, number 3, DLH720. |
| **ATC** | SAS638, **after** next departing Boeing 777 full length, lineup runway 25C **behind**. |
| **Pilot** | **After** departing Boeing 777 full length, lineup runway 25C **behind**, SAS638. |
Wichtig ist dabei immer, dass das Wort **after** am Anfang und das Wort **behind** am Ende genannt wird, und vom Piloten zurückgelesen wird! Wenn der Pilot nicht der nächste in der Abflugsequenz ist und er eine konditionelle Freigabe bekommen hat, sollte ihm mitgeteilt werden, wann er an der Reihe ist (z.B. number 3 for departure) um Missverständnissen vorzubeugen.
Bei der Beschreibung der Flugzeuge sollte die Airline explizit nicht genannt werden. Durch verschiedene Leasing-Verträge und andere wirtschaftliche Verträge passiert es oftmals, dass beispielsweise ein Lufthansa-Flug mit einem Air Dolomiti Flugzeug durchgeführt wird. In diesem Fall würde die Nennung "Lufthansa" die Piloten verwirren, da eigentlich eine Maschine mit Air-Dolomiti Tail gemeint ist. Stattdessen sollte die Beschreibung über den Flugzeugtyp und die Position erfolgen.
*Nicht* möglich wäre folgende Anweisung:
| **ATC** | DLH8JR, behind departing company Airbus A380 via L3, lineup runway 25C and wait behind, number 4. |
Mehrere konditionelle Freigaben gleichzeitig sind nur dann möglich, wenn es sich bei den restriktierenden Flieger um den nächsten am Flugzeug vorbeirollenden Flieger handelt. In diesem Fall wäre der restriktierenden Flieger für die DLH8JR die DLH720. DLH720 ist allerdings nicht das erste Luftfahrzeug, das an DLH8JR vorbeirollt, da zuerst UAL933 den Startlauf beginnt und somit an DLH8JR vorbeirollt. Somit ist die Regel nicht erfüllt.
##### Bei Anflügen
Um die Lücke zwischen zwei Anflügen für einen Abflug zu nutzen (siehe auch [Effizienz im Towerbereich](https://knowledgebase.vatsim-germany.org/books/praktische-verfahren/page/effizienz-im-towerbereich "Effizienz im Towerbereich")), ist es wichtig, dass der Lineup möglichst zeitnah nachdem der erste landende Flieger die Pistenschwelle überflogen hat, erfolgt. Dadurch kann die Startfreigabe und der Startlauf sofort erfolgen, sobald der landende Flieger die Piste verlassen hat.
| Station | Phraseologie |
| **ATC** | DLH5KC, **behind** next landing A320 on 2 NM final, lineup runway 26L **behind**. |
| **Pilot** | **Behind** next A320, lining up runway 26L behind. |
Bei der Beschreibung der Flugzeuge sollte die Airline explizit nicht genannt werden. Durch verschiedene Leasing-Verträge und andere wirtschaftliche Verträge passiert es oftmals, dass beispielsweise ein Lufthansa-Flug mit einem Air Dolomiti Flugzeug durchgeführt wird. In diesem Fall würde die Nennung "Lufthansa" die Piloten verwirren, da eigentlich eine Maschine mit Air-Dolomiti Tail gemeint ist.
Auch hier gilt: Mehrere konditionelle Freigaben gleichzeitig sind nur dann möglich, wenn es sich bei den restriktierenden Flieger um den nächsten am Flugzeug vorbeirollenden Flieger handelt. So darf ein konditioneller Lineup hinter einem landenden Flugzeug beispielsweise nicht vergeben werden, wenn vorher noch ein Flugzeug im Startlauf am wartenden Flieger vorbeirollen wird.
# Staffelung im Towerbereich
### Allgemeines
Alle von der Deutschen Flugsicherung betriebenen Kontrolltürme der internationalen Verkehrsflughäfen (EDDx) haben ein **Radarsystem**, über das gestaffelt werden darf. Das klingt auf den ersten Blick selbstverständlich, ist es aber nicht. In Deutschland gibt es noch einige kontrollierte Flugplätze, wie z.B. Mannheim oder Karlsruhe, die entweder kein Radar haben oder deren Flugsicherungspersonal nicht dafür ausgebildet ist, mit Radar zu staffeln. An diesen Plätzen wird ganz konventionell auf Zeit gestaffelt oder die Staffelung zwischen IFR An- und Abflügen wird an den darüberliegenden Radarlotsen delegiert.
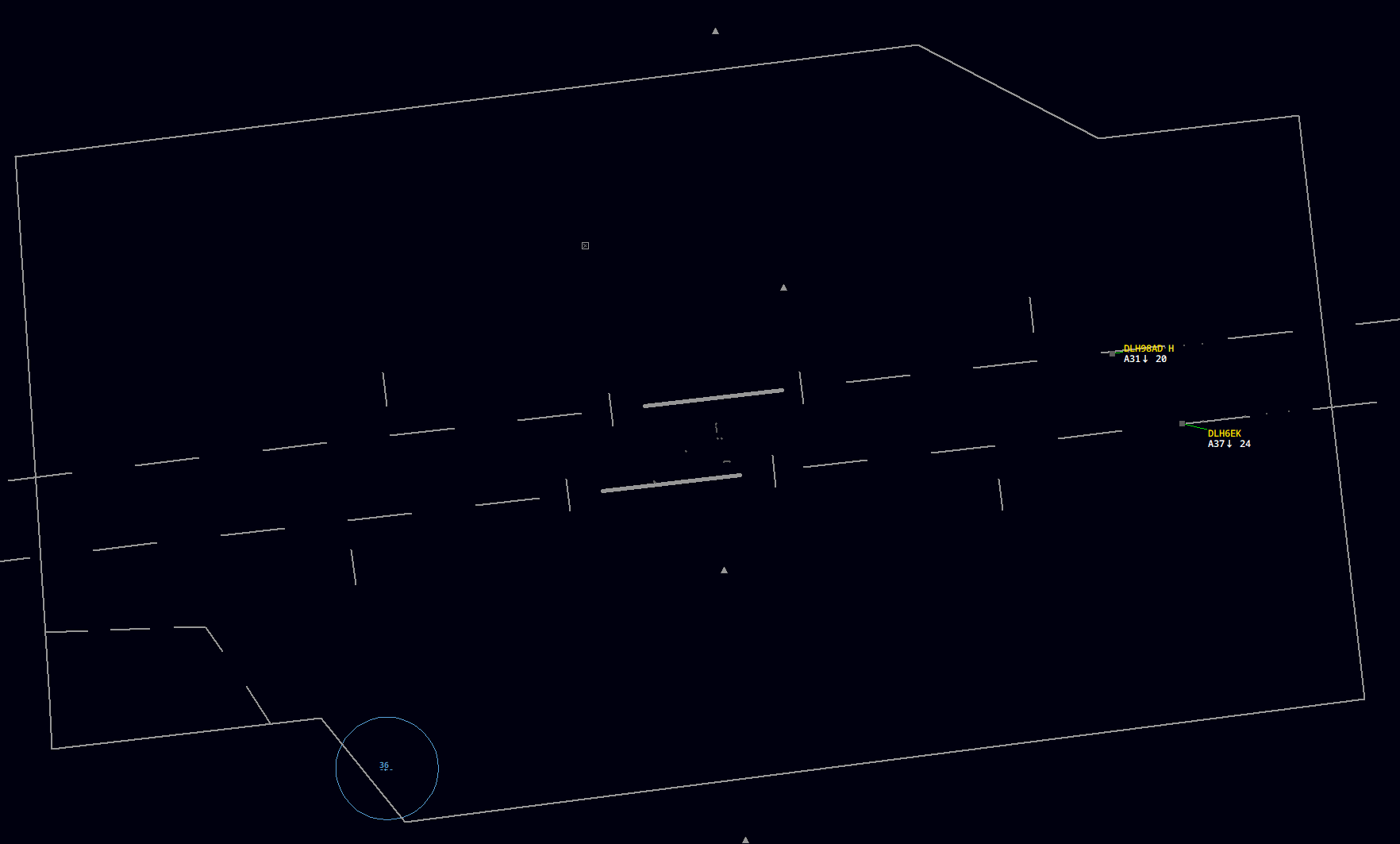
Exemplarisch siehst du hier das Luftlageradar des Flughafens München (für Vollbild klicken):
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-11/atd-luftlage-munchen.png)
Hier sieht man also die entsprechenden lateralen Grenzen der Kontrollzone München, man sieht in der Mitte die beiden Pisten und in deren Verlängerung gestrichelte Linien, die sogenannten *extended centerlines*. Eine Lücke bzw. ein Strich auf dieser extended centerline entsprechen jeweils einer Meile. Unter anderem damit ist es uns möglich, Distanzen in der Kontrollzone abzumessen und folglich das Radar zu nutzen, um eine Staffelung herzustellen. Auf dem Endanflug der Pisten 26L und 26R sieht man zwei Radarziele (Englisch: *radar targets*), die zwei Flugzeuge darstellen. Neben dem eigentlichen Radarziel befindet sich das sogenannte *Label* oder *Tag.* Diese beiden Begriffe beschreiben die Informationen (hier: Callsign, Ground speed und Höhe), die dem Lotsen vom Radarsystem zur Verfügung gestellt werden.
Die **grundlegende Mindeststaffelung** über Radar beträgt 5 NM. Bei entsprechender Radartechnik darf diese Staffelung auf 3 NM reduziert werden. In Deutschland ist die Radarabdeckung inzwischen so gut, dass wir nahezu überall (mit ein paar Ausnahmen in der Bremen FIR und ganz im Süden über den Alpen) unter FL245 mit **3 NM** arbeiten dürfen. Folglich sind auch in deiner Kontrollzone, sofern du dort über Radarstaffelung angewandt werden muss, **3 NM der Mindestwert**.
Zwischen welchen Flügen müssen wir nun die Radarstaffelung sicherstellen? Dafür müssen wir wissen, in welcher Luftraumklasse wir uns befinden. In der Tabelle im [Kapitel Lufträume](https://knowledgebase.vatsim-germany.org/books/luftrecht/page/ubersicht "Übersicht") zeigt uns die dritte Spalte der Tabelle, wer zu wem gestaffelt werden muss. In deinem Luftraum als Tower Controller, also D-CTR, muss **nur zwischen IFR-Flügen gestaffelt werden\***. Nähert sich also beispielsweise ein VFR-Flug einem IFR-Flug in gleicher Höhe auf z.B. 1 NM an, so ist das in D-CTR kein "Regelverstoß". In Luftraumklasse C hingegen wäre das ein "Regelverstoß", da dort (wie du in der Tabelle sehen kannst) IFR auch zu VFR gestaffelt werden muss. Das heißt, der Approach-Lotse muss in Luftraum C sicherstellen, dass jeder VFR-Flug mindestens 3 NM von einem IFR-Flug entfernt ist. Da du als Towerlotse aber eine D-CTR betreust, ist das für dich sehr komfortabel. "Regelverstöße" im Zusammenhang mit Staffelung nennt man übrigens Staffelungsunterschreitungen (STU) (Englisch: Loss of Separation = LoS). Diese STUs gilt es unbedingt zu verhindern, da dies ein sicherheitskritisches Ereignis ist und in der Regel bei einer praktischen Prüfung auf VATSIM zu einem Nichtbestehen führt.
\*In der S2-Ausbildung lernst du noch, dass in der Kontrollzone tatsächlich auch noch IFR zu SVFR (Sonder-VFR) gestaffelt werden muss. Weitere Infos dazu in [diesem ](https://knowledgebase.vatsim-germany.org/books/staffelung/page/radarstaffelung "Radarstaffelung")und [diesem ](https://knowledgebase.vatsim-germany.org/books/vfr/page/sonder-vfr-svfr "Sonder-VFR (SVFR)")Artikel. Für die S1-Ausbildung ist das aber noch nicht verpflichtend anzuwenden, um es nicht zu komplex zu machen.
### Abflüge
Als Tower bist du für die Abflugsequenz und die Abstände zwischen den Abflügen verantwortlich. Es wird sicherlich eine Weile dauern, bis du ein Gefühl dafür entwickelst, wie lange du zwischen zwei Abflügen warten musst, um den gewünschten Abstand zu erhalten.
Zwischen zwei staffelungspflichtigen Abflügen musst du nun den größten Wert aus
- [Radarstaffelung ](https://knowledgebase.vatsim-germany.org/books/staffelung/page/radarstaffelung "Radarstaffelung")(immer 3 NM)
- [Wirbelschleppenstaffelung ](https://knowledgebase.vatsim-germany.org/books/staffelung/page/wirbelschleppenstaffelung "Wirbelschleppenstaffelung")(4 - 8 NM)
- Departure Spacing (individueller Wert)
heranziehen.
**Radarstaffelung** ist also immer das Minimum zwischen zwei IFR-Fliegern. Je nach Konstellation der Wirbelschleppenkategorien musst du auch noch **Wirbelschleppenstaffelung** beachten. Details zu den Werten findest du im entsprechenden Artikel.
Doch was ist nun ein **Departure Spacing**? Manchmal erfordern lokale Verfahren, dass man mehr Abstand braucht, als die Staffelung eigentlich vorschreibt. Ein Beispiel sind Abflüge auf gleichen SIDs:
Als **zusätzliche Anforderung** für das Departure Spacing gilt an den meisten Flughäfen: **Gleiche SIDs** hintereinander brauchen mindestens **5 NM** (Einzelheiten dazu in der **SOP** deines Ausbildungsflughafens).
Während Separation also immer das absolute Minimum beschreibt, so ist Spacing ein Wert, der immer größer oder gleich des Staffelungsminimums ist und einen optionalen Aufschlag enthält.
Mathematisch ausgedrückt: Spacing = Staffelungsminium + optionaler Aufschlag.
Auch vom Approach- oder Centerlotsen kann in Einzelfällen ein Departure Spacing vorgegeben werden, wenn der Luftraum gerade sehr voll ist. Hier kann auch ein **MDI**, also **Minimum Departure Interval**, meist ausgedrückt in Minuten auferlegt werden. Wenn es beispielsweise heißt "MDI CINDY 5 Minutes", darf der Towerlotse alle Departures nach CINDY nur mit einem Abstand von 5 Minuten starten lassen.
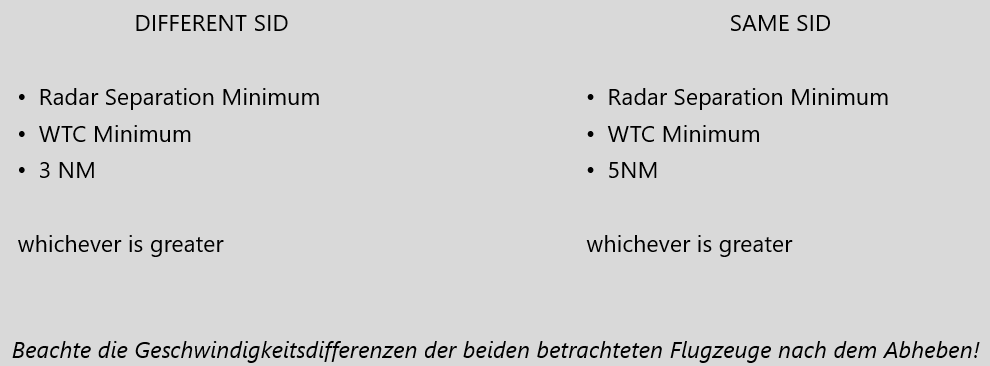
Als Zusammenfassung noch ein kurzer Workflow, der dir schnell und unkompliziert den richtigen Mindestabstand zwischen zwei Abflügen liefert. Im Idealfall gehst du diesen Flow im Sinne der Vorplanung nicht erst durch, wenn die beiden betroffenen Flugzeuge bereits am Holdingpoint stehen. Mach das so früh wie möglich: Beispiel: Ich gebe zwei Piloten zeitgleich eine Freigabe zum Pushback: Dann kann man sich dort schon überlegen, welches Departure Spacing später auf der Bahn notwendig ist. Alles was schon vorgeplant ist, braucht ich nur noch abgerufen werden und du hast Kapazität für andere Dinge.
Hast du zwei verschieden SIDs, so bewegst du dich in der linken Hälfte und gehst die drei Bullet points durch: Radar Separation ist immer 3NM (auf beiden Seiten). Der größte Wert der drei Bullet points ist dein minimales Departure spacing.
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-11/atd-departure-spacing.png)
**Beispiel:** Vorne A340, hinten C172, different SID - Radar Separation Minimum? 3 NM
- WTC Minimum? 6 NM
- Spacing? 3 NM
=> WTC also Minium **6 NM**
| **Beispiel:** Vorne A320, hinten A320, same SID
- Radar Separation? 3 NM
- WTC Minimum? 0 NM
- Spacing? 5 NM
=> Spacing also Minium **5 NM**
|
**Generell gilt:** Bist du dir bei irgendeiner Sache nicht sicher, frage immer nach. Gerade die Kollegen auf APP und CTR haben meist mehr Erfahrung und helfen dir gerne!
### Anflüge
Das Handling der Anflüge für dich als Towerlotse ist schnell erklärt. Du erhältst die anfliegenden Luftfahrzeuge vom Approachlotsen ungefähr 8 - 12 NM vor der Piste. Hast du einen anfliegenden Verkehr bei dir auf der Frequenz, so sollst du ihm so schnell wie möglich die Landefreigabe erteilen. Kommt ein Anflug und du hast keinen abfliegenden Verkehr, so solltest du ihm demnach direkt beim initial call die Landefreigabe geben. Der Pilot muss seine **Landefreigabe spätestens vor dem Überfliegen der Pistenschwelle** erhalten haben. Hat er dort keine Freigabe, so wird er selbstständig durchstarten.
Der Approach-Lotse ist bis zum Überfliegen der Pistenschwelle für die Staffelung zwischen Anflügen zuständig. An internationalen Verkehrsflughäfen (EDDx) darfst du als Tower aber mithilfe von Speeds die Staffelung "retten", solltest du merken, dass es sonst zu eng wird. Außerdem kannst du mithilfe von Speed-Anweisungen z.B. eine Lücke für einen VFRler aufrecht erhalten. Wichtig ist aber, dass du Speed-Anweisungen mit dem Appraoch-Lotsen absprichst, wenn sich hinter dem betreffenden Flieger noch ein anderes LFZ befindet.
Nähern sich zwei Anflüge so nah an, dass dennoch eine Staffelungsunterschreitung droht, so musst du einem der Flieger (in der Regel dem hinteren) einen Fehlanflug anweisen, und zwar, **bevor** es zur Staffelungsunterschreitung kommt. Zusätzlich kann eine Verkehrsinformation über den betreffenden Verkehr sinnvoll sein. Weitere Infos zum Handling von Fehlanflügen findest du im [entsprechenden Kapitel](https://knowledgebase.vatsim-germany.org/books/praktische-verfahren/page/fehlanflug-lotsenguide "Fehlanflug - Lotsenguide").
Ein Wegdrehen unter der MVA ohne den oben genannten Zusatz ist ein schwerwiegender, sicherheitsrelevanter Fehler und führt in Prüfungen zum Nichtbestehen.
##### **3. Koordination mit Approach / anderen Stationen**
- Jeder Fehlanflug muss mit dem Approach-Lotsen (sofern online) koordiniert werden. Verbale Koordination sollte dabei immer bevorzugt angewandt werden, da das reine Labeln im Tag oftmals untergeht.
Beispiel: "*Pickup Nord, Tower - Go ahead - Missed approach Asiana 541, Runway 25L, fliegt \[Standardfehlanflug / Heading 220 wegen der gestarteten United usw.\]. Grund kenne ich noch nicht. - Roger, schick ihn auf die 125.355*"
##### **4. Piloten nach dem Grund fragen und wegschicken**
- Sofern der Grund des Fehlanflugs nicht offensichtlich war (da z.B. vom Lotsen angewiesen), sollte dieser vom Piloten erfragt werden. ("*DLH123, report the reason for the missed approach*"). Der Grund kann nämlich Relevanz für anderen Flugverkehr haben (z.B. Windshears - diese Information sollte unbedingt an nachfolgende Piloten weitergegeben werden) oder aber auch technischer Natur sein (z.B. Probleme mit dem Triebwerk, Fahrwerk usw.), wodurch der Flieger für den nächsten Anflug mit Priorität / im Ernstfall als Notfall behandelt werden sollte
- Sobald der Flieger konfliktfrei zu sämtlichem anderen Verkehr ist und etwas Zeit seit Einleitung des Fehlanfluges vergangen ist, wird der Flieger zum Approach-Lotsen weggeschickt
##### **5. Grund an APP weitergeben**
- Wie oben erwähnt, kann es viele Gründe für einen Fehlanflug geben, die auch für den Approach-Lotsen wichtig zu wissen sind. Daher sollte der Grund an den APP-Lotsen weitergeleitet werden, damit dieser nicht nochmal den Piloten unnötig danach fragen muss
# De-Icing am Beispiel EDDM
### Vorwort
Die Flieger werden immer anspruchsvoller und komplexer, es gibt immer mehr Plugins die nah an der Realität dran sind und es gibt immer mehr Interesse reale Verfahren bei uns zu implementieren - deshalb soll hiermit mal das Thema "Enteisen / Deicing" behandeln.
Vorab, dies soll mehr ein "eye opener" sein um dieses doch eigentlich sehr interessante aber zu unrecht in den Schatten gestellte Thema zu beleuchten. Da man hier etwas weiter ausholen muss, wird der Text also etwas länger werden.
### Allgemeines
#### Was ist enteisen und warum ist dies so wichtig?
Frost, Schnee, Eis sowie sonstige Kontamination haben einen erheblichen Einfluss auf die Aerodynamik eines Flugzeuges. Bereits wenige Milimeter Kontamination / Eis auf der Oberseite des Flügels können den Luftstrom und damit das Flugverhalten erheblich beeinflussen / stören. Sehr viele Luftfahrtzeugkatastrophen hängen mit Vereisung zusammen (einfach mal auf Google nach "aviation incidents / crashes deicing" suchen).
Enteisung kann mechanisch (z.B. mit einem Besen / Schaufel Schnee von der Flügeloberfläche entfernen) sowie chemisch (also mit Enteisungsfluid durch Enteisungsfahrzeuge) geschehen.
#### Wann enteist man? Ja doch nur wenn es schneit oder?
Die Gründe warum enteist werden muss, sind vielfältig. Sehr oft muss auch enteist werden, obwohl es gar nicht schneit, möglicherweise sogar die Sonne scheint. Folgendes Beisspiel: Ihr kommt nach 6 Stunden Flugzeit in München an, habt noch kalten Resttreibstoff in den Flügeltanks die bei -40°C oder kälter sind. Beim Turnaround tankt ihr nach für den Weiterflug, es hat in München +6°C und ist bewölkt, teilweise scheint sogar die Sonne. Was passiert nun? Der warme, neue Kraftstoff kommt in die Tanks, trifft auf den noch sehr kalten Flügel und es bildet sich auf der Oberseite der Flügel eine Klareisschicht, der sogenannte "cold soaked wing effect" hat zugeschlagen. Da wie oben schon erwähnt, Kontamination auf den Flugzeugteilen sich überhaupt nicht mit der Aerodynamik des Fliegers vertragen, kann es sein das eben bei Sonne / Bewölkung und deutlichen Plusgraden, eine Enteisung notwendig ist.
#### Wer entscheidet wann enteist wird? Wer führt diese durch? Wer hat das letzte Wort?
Zunächst einmal der PIC. Dieser ist für die Sicherheit des Fluges verantwortlich. Er entscheidet selbst ob er enteist oder nicht. Ob der Flügel komplett kontaminationsfrei ist und aussieht wie frisch aus dem Werk und er trotzdem enteisen möchte, bleibt ihm überlassen. Selbst wenn, was leider auch oft genug vorgekommen ist, ein rollendes Iglu Richtung Runway rollt, ist die Enteisung immer noch die Entscheidung des Piloten (...oder finanziellen Lage der Airline...).
Sobald sich ein Flugzeug jedoch für die Enteisung angemeldet hat, führt die Enteisung der jeweilige Flughafenbetreiber durch bzw. die Handlingsagenten. Allein diese entscheiden dann darüber WAS am Flugzeug enteist wird und WIE. Sie sind die letzten am Flugzeug und übernehmen damit die Haftung / Verantwortung. Sie handeln nach dem "CAC - clean aircraft concept". d.h., das Flugzeug muss nach der Enteisung von jeglicher Anhaftung / Kontamination befreit worden sein. Sind also ein paar kleine Schneereste auf dem Rumpf des Flugzeuges, wird der komplette Rumpf (oder halt nur die Teilbereiche) enteist, selbst wenn sich der PIC dagegen entscheidet. Er hat hierbei keinerlei Befehlsgewalt (ausgenommen technische Hintergründe bei speziellen Luftfahrtzeugstypen / Einschränkungen).
#### Wie wird enteist (am Beisspiel München EDDM)?
Man unterscheidet zwischen 1-Step Deicing und 2-Step Decing.
Beim 1-Step-Deicing wird eine Mischung aus Typ-1 Fluid und sehr heissen Wasser, knapp 80°C, (Typ-1 ist farblich immer Orange) auf das Flugzeug aufgetragen, Kontamination entfernt und gleichzeitig eine schützende Schicht aufgetragen, welche vor Neuvereisung schützt.
Beim 2-Step-Deicing wird zuerst mit Typ-1 die Kontamination vom Luftfahrtzeug entfernt und danach im 2. Step mit Typ-4-Fluid (kalt, nicht erhitzt, farblich Grün sowie eher dickflüssig) "anti-iced" bzw. geschützt.
#### Holdover Time? Was ist das für eine Zeit?
Die Holdover Time, kurz HOT, ist die Zeitspanne in der das Flugzeug geschützt ist vor erneuter Vereisung. Je nach Art und Weise der Enteisung, der Wetterlage, des Flugzeugtyps (klassisch hauptsächlich Auluminiun z.B. B737 oder vermehrt Kompositmaterialien z.B. B787), des angewendeten Verfahrens der Enteisung, etc., kann dies eine Zeitspanne von nur wenigen Minuten bis zu mehreren Stunden betragen. Ist die HOT abgelaufen, ist kein sicherer Schutz mehr gegeben. Jeder (vernünftige) Pilot wird also nochmal neu enteisen wollen. Hierbei hat jedoch der Pilot selbst Spielraum und kann trotzdem nach eigenen Ermessen starten)
#### Wo wird enteist?
Enteist wird in München direkt auf den Deicing Pads / Areas, welche vorgelagert direkt an den Holding Points vor den jeweiligen Runways sind. Mit diesen Konzept ist München weltweit fast einzigartig (Warum dies so genial ist und warum man das extra erwähnt, dazu gleich mehr).
Typischerweise findet man 3 Deicing Pads pro aktiver Runway. Sprich bei 08er Betrieb, sind / können die Intersections A1/A2/A3 bei 08L zur Enteisung hergenommen werden, auf 08R dann B1/B2/B3. Die Holdingspoints sind zeitgleich die Enteisungspads (08L A1 wird zum Deicing Pad 1, A2 wird zum Deicing Pad 2 usw. ... ) Das gleiche bei 26er Betrieb: Hier gibt es A13/A14/A15 im Norden welche (wer hätte es gedacht??) zu den Enteisungspad DA13/DA14/DA15 werden. Im Süden simultan mit B13/B14/B15 etc. Diese findet ihr übrigens auf den Ground Charts als "DA14" = DeicingArea 14.
PropellerMaschinen ohne Prop-Brake, werden auf Position enteist, also eine Vorfeldenteisung.
#### Warum ist das enteisen direkt an der jeweiligen Runway so effizienz?
Wir haben oben erfahren, das die HoldoverTime anfängt, sobald mit dem Deicing / Anticing begonnen wird. Ab hier tickt die Uhr. Auf anderen Flughäfen findet die sogenannte Vorfeldenteisung statt, sprich das LFZ (Luftfahrtzeug) wird auf Parkposition enteist, die Zeit tickt, dann muss noch gepusht werden, du hast evtl. noch Delay aufgrund Rollverkehr und danach hat man bis zu 10-20 min Taxitime zur Piste. sowie ggf. Wartzeit am Holdingpoint. Diese Zeit geht also unnötig flöten und minimiert unsere HOT.
Vorteil ist bei Remote-Deicing (sprich an den Holding Points), dass man direkt nach der Enteisung zum CAT2/3 Holding Point rollen kann, macht den Engine Runup (sollte gemacht werden nachdem das LFZ enteist wurde) und man direkt starten. Hierbei haben wir minimalen Zeitverlust und die Chance das wir neu enteisen müssen aufgrund abgelaufener HOT, ist sehr gering.
#### Weiterer Vorteil (auch wenn vollkommen unnötig auf VATSIM)
In München befinden sich auf ALLEN Deicing Pads Sammelbecken unterhalb. Das Enteisungsfluid / Schnee fließt am Boden ab durch kleine Rillen in ein Auffangbecken. Dort wird das Enteisungsfluid gesammelt, aufbereitet und kann wiederverwendet werden. Wir können also bis zu 70% komplett wiederverwenden. Das spart sehr viel Geld, schont die Umwelt und mit der entstandenen Abwärme wird ein komplettes Terminal geheizt. Ziemlich genial!
#### Ich will enteisen! Wo muss ich mich anmelden?
In echt geschieht das auf verschiedensten Wegen. Im Normfall rufen die Piloten mindestens 20 min vor TSAT (Target Startup Approval Time) auf der 121.990 Mhz (Callsign "Munich Deicing Coordinator") rein und melden sich dort für die Enteisung an. Dieser sieht über das System alle Informationen zu diesem Flug und bestätigt ihm per Funk die Anmeldung. Weiterhin besteht die Möglichkeit per ACARS sich für die Enteisung anzumelden (je nach Airline), was wir aktuell aber auf VATSIM so (noch??) nicht praktizieren können. Alternativ kann man Tower, Ground, Delivery, Handlingsagenten etc. direkt anrufen.
#### Wie wird das also bei uns auf VATSIM gehandhabt?
Ihr ruft bei Delivery oder der tiefsten Position rein und meldet euch vorher für die Enteisung an.
| Station | Phraseologie |
| **Pilot** | München Delivery, DLH4YA, require deicing before departure. |
| **ATC** | DLH4YA, request confirmed, you are in the sequence for deicing. |
Danach könnt ihr ganz normal pushen und rollen und bei der Übergabe auf den Entrys von Apron zu Tower wird euch dieser direkt auf das jeweilige PAD lotsen.
| Station | Phraseologie |
| **Pilot** | Tower Servus, DLH4YA, Entry S8 for deicing. |
| **ATC** | DLH4YA, servus, taxi deicing area B15 via S, on second radio contact decing crew on XXX,XXX Mhz, report deicing completed. |
(Wenn aus langeweile sich ein ATC auf die Frequenz dazuschalten würde und spaßeshalber die DeicingCrew simulieren sollte ;-) )
Alles weitere ist einfach improvisiert und simuliert, mehr geht technisch aktuell einfach noch nicht ;-) Anbei ein Gesprächsauszug aus dem offiziellen Dokument zur Enteisung am Flughafen München inklusive Gesprächsablauf:
[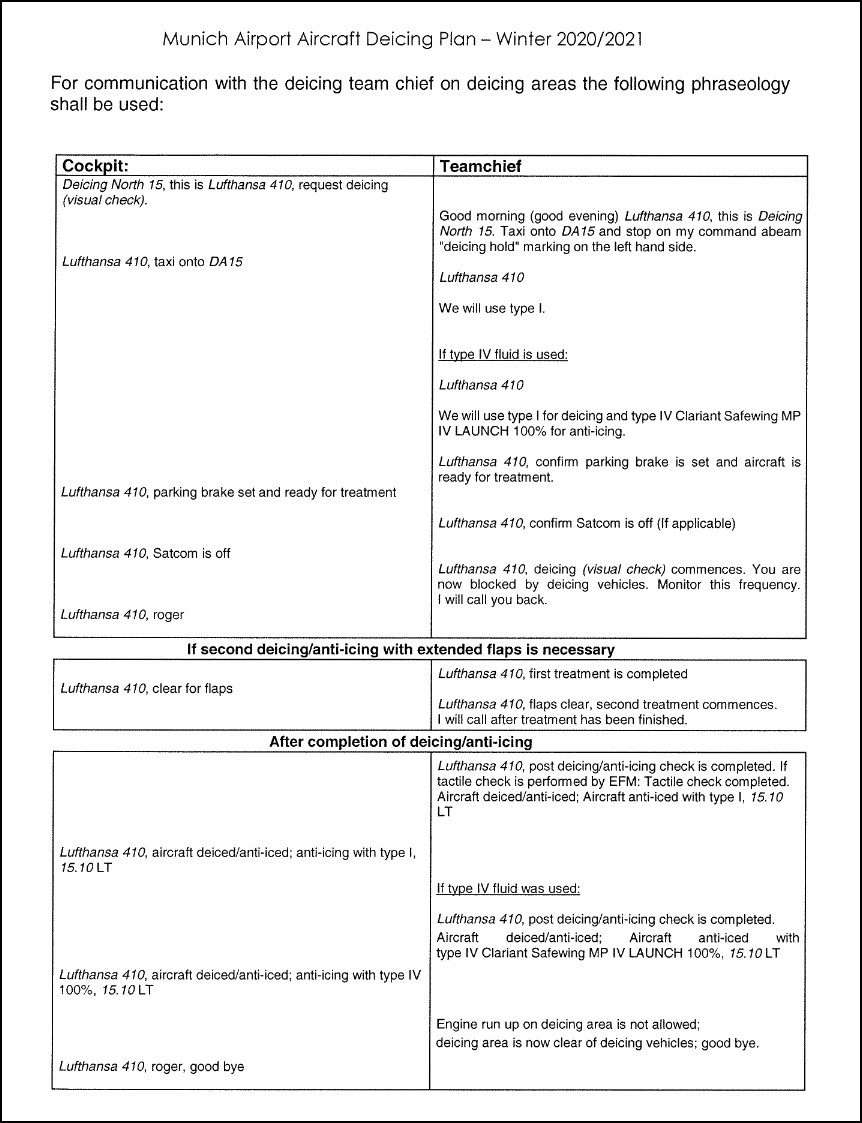](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-10/edmm-deicing-communication.jpg)
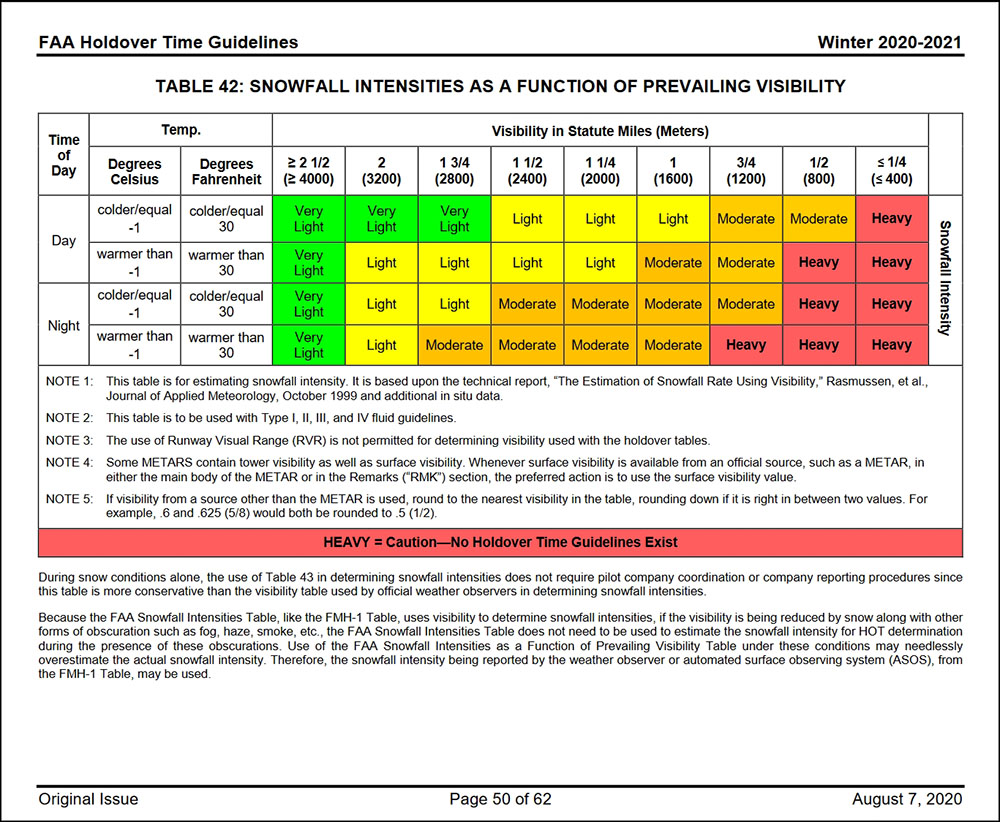
### Crashkurs zum Thema METAR vs. HoldoverTime
Anhand folgenden Beispiel möchte ich kurz und grob anreissen wie man mit den aktuellen METAR Informationen sich aus den Tabellen die HOT / Enteisungsvariante raussucht. Ich versuche das extra kurz zu halten, werde also nicht jede Fußnote behandeln sowie nicht alle Details:
Wir haben folgendes METAR:
1820Z EDDM 26015KT 2000 -SN BKN006 OVC020 M02/M04
Kurz gesagt (und nur sehr grob!), Wetterreport von 18:20 Zulu (also Abends), aus München , Wind aus 260 Grad mit 15 Knoten, 2000m Sichtweite RVR, leichter Schneefall, Bewölkung auf Untergrenze 600 ft, geschlossene Bewölkung Untergrenze 2000 ft, Temperatur -2c, Taupunkt -4c.
Jetzt weiss ich schon, wir haben nicht alleine "active Frost" wo wir nur 1-Step mit Typ 1 deicen / antiicen können, sondern wir haben Abends / Dunkelheit, aufgrund des Schneefalls wenig Sicht und Minustemperaturen.
Da wir nur RVR Werte haben (in echt verwendet man die MOR meteorological observation range) gehen wir also direkt in die Tabelle 42: SNOWFALL INTENSITIES AS A FUNCTION OF PREVAILING VISIBILITY. Wir wissen es ist Abends, also gehen wir in die linke Spalte bei "Night". Wir wissen ebenfalls es hat aktuell -2 Grad, also gehen wir in die Spalte "colder/equal -1".
[](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-10/edmm-deicing-vischart.jpg)
Jetzt nehmen wir uns die gemeldete Sicht von 2000 m und schauen oben in der Spalte wo wir uns einordnen müssen. In unseren Fall bei 1 1/4 (2000). Gut, ein Finger links, ein Finger von oben, beides zusammen gefügt und wir kommen beim Wert "MODERATE" heraus. Ganz einfach oder?
Mit diesem "MODERATE" Wert im Hinterkopf gehen wir nun rüber zu Tabelle 27: Typ IV HOLDOVER TIMES FOR CLARIANT SAFEWING MP IV LAUNCH (Das ist das Enteisungsfluid Typ 4 mit einer Konzentrations von 100%, welches uns der Deicing Coordinator genannt hat was verwendet wird).
[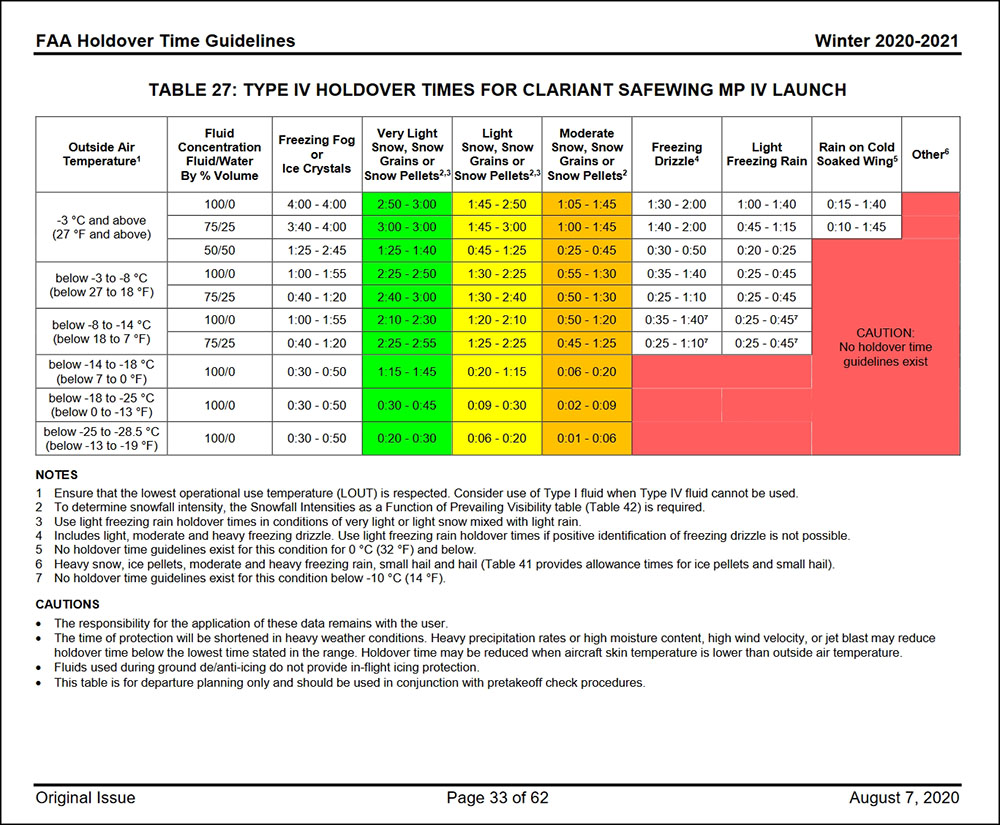](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2022-10/edmm-deicing-hottyp-4.jpg)
Nun geht das weiter wie vorher: Wir wissen in der linken Spalte bei "Outside Air Temperature" wir haben 2°C, ergo sind wir bei "-3°C and above". Wir wissen ebenfalls das die Konzentration 100% Typ 4 hat, ergo gehen wir in der Spalte bei "100/0".
Wir haben uns vorher die Sichtweite und den jeweiligen Wert rausgesucht, welcher "MODERATE" war und rutschen in die jeweilige Spalte zu "MODERATE SNOW; SNOW GRAINS OR SNOW PELLETS"..... und bekommen einen Wer von 1:05 - 1:45 heraus. Heisst, sobald das Anticing beginnt, spricht der erste Kontakt mit Typ 4 auf dem Flugzeug, haben wir nun eine Holdovertime zwischen 1h05 min bis 1h:45 min. Damit kriegt euch ATC ziemlich sicher raus und ihr habt noch guten Zeitpuffer. War also doch gar nicht mal so schwer oder? ;-)
Als Anlage habe ich jeweils die Tabellen angefügt, wer bisschen selber lesen möchte sucht einfach nach den "FAA2020-2021 Holdover Tables".
Dies sollte euch mal einen groben Einblick in die Welt des Enteisens geben, warum dies so wichtig ist, was dahinter steckt, wie das grob abläuft und welche ungefähren Abläufe dahinter stecken. Xplane, der FSLabs sowie die Majestic Dash Q400 simulieren bereits Vereisungen, in GSX und Co. kann man auch selbst enteisen aktuell und die Entwicklung der Flugzeuge nimmt dieses Thema immer mehr und mehr auf.
Für Rückfragen, Anregungen, Fachfragen oder Diskussionen stehen wir (RG München) immer gerne zur Verfügung! Ggf. wird dieser Thread noch etwas erweitert falls nötig. Rechtschreibfehler und sonstiges dürfen gesammelt und gegen ein Eis eingetauscht werden.
### Epilog
Diesen Beitrag hat Florian Weingartner, RG München, erstellt und freundlicherweise einer Übertragung hier ins Wiki zugestimmt.
# Low Visibility Operations (LVO)
Die korrekte Anwendung von LVO ist kein verpflichtender Bestandteil der S1-Ausbildung.
Einführung
Im Normalbetrieb fliegen Piloten einen ILS-Anflug bis zum sogenannten CAT1 Minimum. In der Regel ist dieses 200ft über der Pistenschwelle. Spätestens beim Minimum muss die Besatzung bestimmte Markierungen der Bahn oder die Bahnbefeuerung in Sicht haben, um den Anflug fortsetzen zu können. Ist dies am Minimum nicht der Fall, muss das Luftfahrzeug durchstarten. Für schlechtere Witterungsverhältnisse gibt es daher ILS (und neuerdings auch GLS/GBAS) Anflüge CAT2 und CAT3. Damit diese durchgeführt werden dürfen, benötigt das Flugzeug eine gewissen Ausstattung (z.B. ein Radio Altimeter), die Besatzung muss dafür geschult und zugelassen sein und der Flugplatz muss eine entsprechend präzise und zugelassene ILS-Anlage haben. Zusätzlich bedarf die Bereitstellung der CAT2- und CAT3-Verfahren bestimmte betriebliche Verfahren seitens der Flugsicherung und des Flugplatzbetreibers. Diese werden in den folgenden Kapiteln erläutert. Werden CAT 2/3 Verfahren aktiv, redet man von **Low visibility operations** (**LVO**) bzw**. Low visibility procedures** (**LVP**).
#### Voraussetzungen und Aktivierung
LVPs sind aktiv, sobald eines der beiden folgenden Kriterien erfüllt ist:
\- Hauptwolkenuntergrenze < 200 Fuß
\- Runway Visual Range (RVR) <= 600 Meter
Die Hauptwolkenuntergrenze ist die niedrigste Wolkenuntergrenze mit einer Bedeckung von mehr als 50%, also BKN oder OVC. Manchmal ist (z.B. aufgrund von dichten Nebels) keine Wolkenuntergrenze messbar. In diesem Fall greift man auf die Vertikelsicht zurück (eng. vertical visibility). Diese wird im Format VVxxx angegeben. Dazu ein paar Beispiele:
\- VV010 = Vertikalsicht 1000 Fuß
\- VV002 = Vertikalsicht 200 Fuß
\- VV/// = Vertikalsicht nicht messbar. Dieser Wert ist als Vertikalsicht kleiner 100 Fuß zu interpretieren
Die Runway Visual Range ist ein über ein Messsystem ermittelter Wert, der sich von der durch einen Wetterbeobachter ermittelten Ground Visibility unterscheidet. Ausschlaggebend für die Bereitstellung der LVOs ist in puncto Horizontalsicht ausschließlich die RVR. Weitere Informationen zur RVR findest du [hier.](https://en.wikipedia.org/wiki/Runway_visual_range)
Für Plätze mit mehreren Pisten gilt: LVOs betreffen immer den gesamten Flugplatz. Auch wenn auf einer Bahn die RVR weit über 600 Metern ist, auf der anderen aber 550 Meter, so gelten auf allen Bahnen und Rollwegen Low Visibilty Procedures
#### Maßnahmen bei LVO
##### ATIS schalten
Die Piloten werden über Low Visibility Operations über die ATIS informiert (LOW VISIBILITY PROCEDURES IN PROGRESS CAT II AND III AVAILABLE). Ohne diese Information (oder anderweitige Absprachen) dürfen die Piloten keine Anflüge mit Minima kleiner 200 Fuß durchführen. Um diesen Hinweis in der ATIS auszusenden, muss an die ATIS-Maker URL der Zusatz *&lvp* angehängt werden (je nach Regionalgruppe und Flugplatz kann der Zusatz auch abweichen). Weiterführende Informationen zum Thema [ATIS](https://knowledgebase.vatsim-germany.org/books/meteorologie/page/atis "ATIS") findest du im gleichnamigen Knowledgebase-Artikel und insbesondere in den dort verlinkten FIR-ATIS-Artikeln.
Die „normalen“ CAT 1 Holdingpints liegen innerhalb dieses Bereichs, weshalb bei LVPs andere Holdingpoints verwendet werden, die sogenannten CAT 2 Holdingpoints. Im Bodenradar findest du bei den Takeoff-Intersections in der Regel immer zwei Holdingpoints. Der CAT1 Holdingpoint ist näher zur Bahn, der CAT 2 Holding Point etwas weiter davon entfernt.
Bei der Freigabe zum Holdingpoint muss dementsprechend im Funk folgende Phrase verwendet werden: „*DLH414, TAXI TO **CAT II HOLDING POINT** RUNWAY 26R via N A15*“.
Dementsprechend gilt die Bahn bei LVP bei einem gelandeten Luftfahrzeug (LFZ) auch grundsätzlich erst dann als verlassen, wenn das Flugzeug gänzlich hinter dem CAT 2/3 holdingpoint ist. Andernfalls gilt die Piste in Bezug auf Staffelung nicht frei.
An manchen Plätzen ist das Landing Clearance Line (LCL) - Verfahren zugelassen. Hier gilt die Piste als verlassen, wenn das Flugzeug die sogenannte Landing Clearance Line (befindet sich in der Regel 102m vor der Pistenmitte entfernt) vollständig überrollt hat. Dieses Verfahren ist teilweise noch weiter eingeschränkt (z.B. nur für WTC M oder L). Einzelheiten ob das Verfahren an deinem Platz zugelassen ist, wo sich die Landing Clearance Line befindet und wie du damit arbeitest findest du in der SOP deines Ausbildungsflughafens.
Wichtig: Je nach SOPs des jeweiligen Flughafens muss die Sensitive Area frei sein, wenn der nächste Anflug den 2 Meilen Endanflug erreicht. Ist die Senitive Area nicht frei, wenn der folgende Anflug bei 2 Meilen ist, so muss dem Anflug ein Go-Around angewiesen werden. Bei der Verwendung des Landing Clearance Line Verfahrens muss die Landing Clearance Line spätestens dann überrollt sein, wenn der folgende Anflug im 0.6 NM Endanflug oder 200ft AGL ist. Ob diese Verfaren auf Vatsim genutzt werden, kann in den jeweiligen Tower-SOPs nachgelesen werden.
##### RVR übermitteln
Nicht bei jeder RVR kann auch noch legal gelandet werden. Das hängt von verschiedenen Faktoren ab. Dazu zählt die Zertifizierung der Airline, des Flugzeugs, der Crew, aber auch die Anflugart. Damit ein Pilot nun weiß, ob er aktuell noch landen darf, muss er zu zwei Zeitpunkten die aktuellste RVR erhalten:
- Bei der Anflugfreigabe (vom Approach-Lotsen): "*DLH123, cleared ILS approach runway 25L, RVR 800 meters"*
- Spätestens im 4 NM Endanflug erneut (kann auch mit der Landefreigabe gegeben werden): "*DLH123, RVR runway 25L 600 meters, wind 210 degrees, 4 knots, runway 25L cleared to land"*
Da es auf VATSIM keine Quelle für Live-RVRs gibt, wird stattdessen die RVR aus der METAR vorgelesen. Manchmal kann es auch sein, dass nur eine RVR für die Gegenrichtung (z.B. 08R statt 26L) in der METAR steht. Dann wird diese verwendet. Wenn für eine betreffende Piste gar keine RVR in der METAR vorhanden ist, kann davon ausgeganden werden, dass die RVR größer als 2.000 Meter ist.
##### Einstellung bestimmter Verfahren
Einige Verfahren sind daran geknüpft, dass die Flieger sich gegenseitig sehen oder der Towerlotse die Flugzeuge aus seinem Fenster sieht. Auf Vatsim simulieren wir dies bei gutem Wetter auch. Spätestens bei LVO sind die Sichten aber so schlecht, das folgende Verfahren nicht mehr zulässig sind:
- Konditionelle Line-ups
- Multiple Line-ups
- Reduzierte Pistenstaffelung (Grenzwerte sind bereits höher)
- VFR / SVFR (Grenzwerte sind bereits höher) - Ausnahme: Pilot bestätigt, dass er VMC simuliert
- Staffelung nach Sicht in Flugplatznähe
- Rollen auf unbeleuchteten Taxiways (sofern in den SOPs des Flughafens erläutert)
Des Weiteren sollten Anweisungen wie "*Expedite taxi*" oder "*Expedite vacating the runway*" vermieden werden, da es dem Piloten in der Regel aufgrund der schlechten Sichten nicht möglich ist, schneller zu rollen.
# Approach
# Radarvektoren
Radar Vectors bedeutet nichts anderes, als dass ein Flugzeug durch Angabe von Headings (Steuerkursen) vom Fluglotsen gelenkt wird. Anders als bei einem Standard IFR Procedure (STAR, SID, Standard Approach) muss man sich dabei an eine sogenannte Minimum Vectoring Altitude (MVA) halten. Diese ist für bestimmte genau definierte Gebiete vorgegeben, und garantiert eine Hindernissfreiheit (Obstacle Clearance) von mindestens 500 ft und eine ausreichende Radar und Funk Coverage. Im Euroscope können die MVA-Gebiete eingeblendet werden. Werte in Klammern gelten für die Wintermonate.
Radar Vectors können als Heading (z.B. Heading 210) oder als relative Turn Instruction (z.B. right/left by 10 degrees) gegeben werden. Letzteres sollte nur benutzt werden, wenn die Zeit nicht ausreicht, um ein Heading zu erfragen. Ansonsten immer mit Headings arbeiten.
Für den Fall, dass ein Radar Vector nicht selbsterklärend ist (wie z.B. beim Final Approach) sollte der Grund immer mit angegeben werden (for separation, for spacing, etc.).
Besonders aufpassen muss man, wenn sich ein Flugzeug im Turn befindet. In diesem Fall sind Aufforderungen wie: "Turn left/right by..." total sinnlos, da der Flieger im Turn ja gar nicht weiß, auf welches Heading sich diese Anweisung beziehen soll! Wenn es also wichtig ist, dass der Flieger sofort auf ein bestimmtes Heading dreht bietet sich folgende Phrase an:
> DLH123 stop turn heading 180
Radar Vectors auf ILS bzw. Localizer sollten mit einem Heading von 30° zum Endanflugkurs gegeben werden. Beispiel: Pistenrichtung 26 - Heading für intercept 230° bzw. 290°.
**Eine Freigabe für einen Approach hebt die zuvor gegebene Speed Anweisung nicht auf!** Dies muss dem Piloten expliziet mitgeteilt werden.
> DLH123 resume normal speed, turn right heading 220, cleared ILS 26R.
> DLH123 turn right heading 230, cleared ILS 26R, maintain 220 kts to 10NM final thereafter 170 kts until 5 miles final.
Das Ende einer STAR ist der IAF, welcher zugleich ein Holding beinhaltet. Dieser IAF ist automatisch für den Anflug das Clearance Limit, sollte diese nicht früher definiert sein. Erhält der Pilot bis zum Clearance Limit keine weitere Anweisung, was er machen soll, so muss er dort ins Holding einfliegen. Daher ist es nicht verkehrt, dem Piloten gleich beim intial contact eine Anweisung zu geben, was er nach dem letzten Waypoint tun soll Die Freigabe auf einen Transitionwegpunkt (z.B. DM427) beinhaltet die Freigabe zum weiteren Abfliegen der Transition.
> DLH123, identified, leave ROKIL on Heading 120, expect ILS 26R.
Das verhindert Zwischenrufe der Piloten bei hoher Frequenzbelastung und zeugt von guter Vorausplanung !
Wenn man eine Departure von der SID wegdrehen will muss man beachten, dass aus Lärmschutzgründen dies in Deutschland erst ab 5000 ft AGL für Jets bzw. 3000 ft für Props erlaubt ist. Unter der MVA ist es, natürlich, total untersagt.
**Tipp:** Kurze Anmerkung zum Intercept-Heading: Falls bekanntermaßen starke Nord- oder Südwinde anliegen, lohnt es sich zum Teil, den Kurs entsprechend anzupassen, also um 5° oder sogar 10° zu verschieben. Sonst kommt der Pilot, der in den Wind fliegt, evtl. nicht vor dem Gleitpfad auf den Landekurs. Sinnvollerweise am Anfang mal zwei, drei Piloten nach 'nem Windcheck fragen. Dass Piloten mit extrem unterschiedlichen Winden unterwegs sind, ist ja in den letzten Jahren extrem zurück gegangen (gefühlt). Eher die Ausnahme und erfordert ein wenig Fingerspitzengefühl, falls doch mal jemand den Wind von ganz woanders hat.
### Weiterführende Links
- **Skybrary:** [Basic Controller Techniques - Vectoring (englisch)](https://www.skybrary.aero/index.php/Basic_Controller_Techniques:_Vectoring)
- **Skybrary:** [Vectoring Geometry (englisch)](https://www.skybrary.aero/index.php/Vectoring_Geometry)
- **Skybrary:** [Conflict Solving (englisch)](https://www.skybrary.aero/index.php/Conflict_Solving)
- **Skybrary:** [Basic Controller Techniques - Vertical Speed (englisch)](https://www.skybrary.aero/index.php/Basic_Controller_Techniques:_Vertical_Speed)
# Geschwindigkeiten
Sinnvoll eingesetzt ist Speed Control ein sehr hilfreiches Mittel um Flugzeuge zu separieren und Sequenzen aufrecht zu halten.
### Verschiedene Geschwindigkeiten
Man unterscheidet in der Luftfahrt in verschiedene Geschwindigkeiten.
- **IAS (indicated airspeed):**
Die Geschwindigkeit, die dem Piloten auf dem Airspeed Indicator angezeigt wird. Sie ist maßgeblich für das aerodynamische Verhalten des Flugzeugs, also wieviele Luftmoleküle tatsächlich um den Flügel strömen und Auftrieb erzeugen. Sie wird in der Motorfliegerei generell in KIAS (knots indicated airspeed) angegeben (kts=NM/h)
- **TAS (true airspeed):**
Die tatsächlich geflogene Geschwindigkeit, also die relative Geschwindigkeit des Flugzeugs im Verhältnis zu der umgebenden (unbewegten) Luft. Die Diskrepanz zwischen IAS und TAS wird also immer größer, ja höher ein Flugzeug fliegt, da die Luft dort immer dünner wird, und das Flugzeug immer schneller bezogen auf die TAS fliegen muss, damit die IAS konstant bleibt, also die gleiche Menge an Luftmolekülen pro Zeiteinheit um den Flügel strömen. Sie wird in KTAS (knots true airspeed) angegeben.
- **GS (Ground Speed):**
Die Geschwindigkeit der senkrechten Projektion des Flugzeugs auf die Erdoberfläche. Diese ist also die TAS mit den eingerechneten Windeinflüssen, die das Flugzeug bei Gegenwind über Grund langsamer und bei Rückenwind schneller als die TAS fliegen lassen. Dies ist die Geschwindigkeit, die dem Lotsen auf dem Radar angezeigt wird.
- **Mach Number:**
Prozent der Schallgeschwindigkeit. Angegeben mit einem Punkt und den Prozenten, also z.B. "Mach .80" = 80% der Schallgeschwindigkeit. Die Mach Number ist abhängig von vielen Werten, wie Luftdichte und Temperatur.
Ähnlich wie die Faustformel für Sinkflüge (1000 ft in 3 NM) sind es für Geschwindigkeitsreduzierungen 10 kts in 1 NM.
### Nutzung der verschiedenen Geschwindigkeiten
**Unter FL280** wird mit der **Indicated Airspeed (IAS)** gearbeitet, da diese für das aerodynamische Verhalten des Flugzeugs zuständig ist.
**Über FL280** wird dann in der Regel die **Mach Number** benutzt, da die Flugzeuge dann so schnell werden, dass die obere Grenze der möglichen Geschwindigkeit nicht mehr nur durch aerodynamische Aspekte, sondern auch durch die sogenannte "kritische Mach Zahl" bestimmt wird. Dies ist die Mach Number, bei der an dem Flugzeug erste Effekte der mit Überschall strömenden Luft auftreten, die nicht nur Turbulenzen sondern auch eine schlechtere Steuerbarkeit der Ruder bewirken. Je höher das Flugzeug steigt, desto geringer wird seine größtmögliche IAS, bei gleichbleibender Mach Number.
Wenn bei sinkenden Flugzeugen Speedcontrol anwendet wird, kann und muss schon über FL280 IAS benutzt werden. Das kann auch schonmal FL340 oder so sein.
Je nach Flugzeugtyp ist die "Umschalthöhe" zwischen IAS/mach/IAS ja auch über oder unter FL280.
Eine Veränderung von **Mach 0.01** bewirkt eine Veränderung der **TAS** von etwa **6 KT**.
Bei Bedarf kann auch die folgende Phraseologie genutzt werden. Man muss jedoch damit rechnen, dass nicht jeder Pilot diese Anweisung versteht!
> DLH123 maintain Mach decimal 80, on conversion 320 knots
Einige Beispielwerte, bei welchem FL von IAS auf Mach umgeschalten wird:
| **Mach** | **IAS** | **Conversion FL** |
|---|
| **.82** | **310** | FL303 |
| **.82** | **280** | FL350 |
| **.82** | **250** | FL399 |
| **.78** | **310** | FL278 |
| **.78** | **280** | FL324 |
| **.78** | **250** | FL374 |
| **.74** | **310** | FL250 |
| **.74** | **280** | FL299 |
| **.74** | **250** | FL350 |
### Berechnungen
#### Faustformeln
0.01M Differenz ~ 6 KT GS
1000ft Höhenunterschied ~ 6 KT GS (Je höher desto schneller)
1 KT GS = 1 NM pro Stunde
60 KT GS = 1 NM pro Minute
#### Abstand bei bestimmten Punkt
Mehrabstand = Mehrabstand zwischen 2 Fliegern in nm
m = 60 Minuten / Flugzeit bis zum Punkt an dem der Abstand bestehen soll
Mehrabstand \* m = Speed Delta in KT
Speed Delta in Mach = Speed Delta in KT / 6
Eine detaillierte Erklärung zu den Faustformeln gibt es als Video [hier. ](https://www.youtube.com/watch?v=NB6cMrjQHxE "Speed Control - Rules of Thumb")
##### Beispiel
Wir haben Flieger A und Flieger B auf gleicher Höhe, beide verlassen den Sektor bei Punkt P.
*Flieger A hat noch 150 NM (20 Minuten) bis Punkt P. *
*Flieger B hat noch 146 NM (19 Minuten) bis Punkt P. *
Wir wollen einen Abstand von mindestens 7nm bei Punkt P. 4nm Abstand haben wir bereits, also müssen wir einen Abstand von zusätzlich 3 NM (7 NM die wir wollen - 4 NM die wir bereits haben) in 20 Minuten erreichen.
Jetzt berechnen wir, wie viel kts GS Unterschied wir zwischen den Fliegern brauchen, damit wir diesen Abstand erreichen.
Da die Geschwindigkeiten pro Stunde sind, rechnen wir das ganze jetzt auf 60 Minuten hoch.
*60 Minuten / 20 Minuten = 3*
*3 NM Abstand \* 3 = 9 NM Abstand*
*Da wir wissen 1 KT GS = 1 NM pro Stunde wissen wir jetzt, dass wir einen
Geschwindigkeitsunterschied von 9 KT GS brauchen, um in 20 Minuten einen Abstand von 3 NM zu erreichen.*
Wir wissen 0.01M ~ 6 KT GS, daher brauchen wir in diesem Fall einen Machunterschied von 0.02M, was ein Unterschied von 12 KT GS sein wird, dieser wird zu 4nm mehr Unterschied in 20 Minuten führen, daher zu insgesamt 8 NM (4 NM aktueller Abstand + 4 NM neuer Abstand durch Geschwindigkeitsunterschied) Abstand bei Punkt P führen. Falls die Flieger nicht auf der selben Flughöhe sind, müssen wir 6 KT pro 1000ft vom Speed Delta abziehen, wenn der höhere Flieger der vordere ist. Wenn der höhere Flieger der hintere ist, müssen wir pro 1000ft 6 KT zum Speed Delta hinzufügen.
#### Abstand nach bestimmter Zeit
Wenn Speed Control benutzt wird, kann der Abstand nach einer bestimmten Zeit leicht berechnet werden:
Spacing = Speed-Differenz / 60 pro Minute
Als Faustformel erhält man bei einer Geschwindigkeitsdifferenz von 30 KT (z.B. 250 KT und 280 KT) über eine Distanz von 30 NM ein Spacing von etwa 3 - 3,5 NM.
##### Beispiel
Wenn das vordere Flugzeug also 30 KIAS mehr fliegt als das hintere, kommt pro Minute eine halbe NM spacing mehr dabei heraus! Vorsicht, wenn das hintere Flugzeug noch wesentlich höher ist als das vordere! Wir erinnern uns, dass die TAS immer mehr abnimmt, je tiefer das Flugzeug fliegt. Es kann also sein, dass der hintere bereits 30 KIAS langsamer fliegt als der vordere, und trotzdem bezogen auf die GS immer noch schneller ist, eben weil er höher ist. Deshalb ist es eine gute Taktik, die Flugzeuge, die man langsam haben will, zuerst auf die gewünschte Höhe zu bringen und danach die Speed zu reduzieren. Wenn eine hohe Rate of Descend gehalten werden soll, ist es natürlich schwer möglich seine Speed radikal zu reduzieren. Das sollte man berücksichtigen!
Im Anflug auf einen Airport wird, wenn Holdings zu erwarten sind, gerne die Formulierung: "Reduce Minimum Clean Speed" benutzt, also die Aufforderung, auf die geringstmögliche Geschwindigkeit ohne Setzen der Klappen zu reduzieren. Dabei ist zu beachten, dass so eine Speed immer unterschiedlich sein kann, je nach Flugzeugtyp und Beladung. Sie kann also nicht als Staffellungsgrundlage verwendet werden. Die Formulierung "Reduce Minimum Approach Speed" soll nicht verwendet werden!
Auf dem Final gilt folgende Regel: Auf dem Weg zum 10 NM Final Point geht ca. 1 NM Spacing verloren, weil die vordere Maschine früher reduziert. Das gleiche gilt am Outer Marker. Man sollte also beim Vectoring auf Minimum Separation + 2 NM zielen, damit die Separation bis zum Touchdown ausreichend bleibt!
### Advanced: Ground Speed Effekt
Zunächst müssen wir einen Blick auf die verschiedenen Geschwindigkeiten werfen. Der Pilot hat seine indicated airspeed (IAS). Der Controller hat die Groundspeed (GS). Das verbindende Element ist die True Airspeed (TAS). Die IAS ist nur ein Indikator, wie schnell sich das Flugzeug im Moment durch die Luft bewegt. Die GS ist ein Indikator, wie schnell sich das Flugzeug relativ zum Boden bewegt. Hier wird alles wie z.B. Luftdichte, Wind, etc. korrigiert. Diese Geschwindigkeit entspricht genau der, die ein Auto auf dem Boden hätte. Die TAS ist ein bisschen trickreich. Sie gibt die Geschwindigkeit an, die ein fester Körper in einem bestimmten Medium hat. Wenn wir den Wind beiseite lassen, müssen wir uns nur mit dem festen Körper (unserem Flugzeug) und dem Medium (Luft) beschäftigen, in dem er sich bewegt. In großen Höhen wird die Luft dünner. Das bedeutet weniger Widerstand durch das Medium, was zu einer höheren Geschwindigkeit des Festkörpers führt. Die Schlussfolgerung: Je höher das Flugzeug, desto größer die Geschwindigkeit. Diese Geschwindigkeiten hängen alle miteinander zusammen. Mit einer einfachen Formel kann die TAS bestimmt werden. Die Groundspeed ist dem Lotsen bekannt, die angezeigte Fluggeschwindigkeit muss beim Piloten erfragt werden.
TAS = IAS + FL / 2
##### Beispiel
Nehmen wir an, der Approach hat zwei Flugzeuge als Paket vom Center bekommen. Beide befinden sich auf der gleichen STAR auf unterschiedlichen Höhen und es gibt nicht genug Platz und die Flugzeuge lateral zu seperieren.
Unser Szenario ist wie folgt: **DLH123 auf FL150 / 300 KIAS** - **CFG999 auf FL160 / 300 KIAS**, gleiche laterale Position, gleiche Flugrichtung. Wir brauchen sie nun beide auf 5000ft und 3NM seperation innerhalb von 40NM nur mit Nutzung vertikaler Techniken. Wir nehmen an das Windstille herrscht, somit gilt GS = TAS.
TAS DLH123 = 300 KT + 150 / 2 = 375 KT TAS
CFG999 = 300 KT + 160 / 2 = 380 KT
Wir benötigen beide Flugzeuge auf 5000 ft, für DLH123 gilt somit:
TAS DLH123 = 300 KT + 50 / 2 = 325 KT
Dies führt zu einer Geschwindigkeitsdifferenz zwischen den Luftfahrzeugen von 55 KT (380 KT - 325 KT), sodass die laterale Seperation um etwa 1 NM pro Minute zunimmt (55 KT / 60 Minuten).
Wir brauchen also drei Minuten, um die Luftfahrzeuge bei der Geschwindigkeitsdifferenz auf 3 NM zu separieren. Wir müssen beide Flugzeuge gleichzeitig sinken lassen und eines muss unseren Zielfix drei Minuten vor dem anderen erreichen. Wie müssen nun die Sinkraten sein, um dies zu erreichen?
Zunächst berechnen wir die Rate des höheren Flugzeugs. Dieser bewegt sich mit 380 KTS GS. Er braucht ca. 6 Minuten für die 40 NM (40 NM / (380 KT / 60 Minuten)) und muss 10.000ft verlieren. Dies führt zu einer Sinkrate von 1700 ft/m.
DLH123 braucht auf seiner aktuellen Höhe und Geschwindigkeit ebenfalls 6 Minuten, muss aber 3 Minuten nach dem höheren CFG999 dort sein. Sie muss also die 11.000ft in 3 Minuten verlieren (6 Minuten Flugzeit insgesamt und die 3 Minuten, die zur Erhöhung der Separation benötigt werden, lassen 3 Minuten für den Sinkflug übrig). Das bedeutet eine Sinkgeschwindigkeit von etwas 3600 ft/m.
### Weiterführende Links
- **Skybrary**: [Basic Controller Techniques - Speed Control](https://www.skybrary.aero/index.php/Basic_Controller_Techniques:_Speed_Control) (englisch)
- **Youtube**: [Enroute Speed Control](https://www.youtube.com/watch?v=-Uwe1vjaDCw) (englisch - LOVV FIR)
- **Youtube**: [Speed Control - Rules of Thumb](https://www.youtube.com/watch?v=NB6cMrjQHxE&) (englisch)
# Das Bilden von Anflugsequenzen
Dieser Leitfaden soll neuen Approachlotsen einen leichten Einstieg in die Thematik bieten. Er enthält die grundlegenden Prinzipien und wichtige Tipps für das Bilden von Sequenzen auf dem Endanflug. Das detaillierte Wissen aus den Artikeln "Radarvektoren" und "Geschwindigkeiten" wird vorausgesetzt.
### Grundlegendes
#### Begrifflichkeiten
**"Separation"** (deutsch: Staffelung) meint den minimalen Abstand, den zwei Flugzeuge vertikal und/oder lateral zueinander haben müssen. Wichtig sind in diesem Leitfaden vor allem die Radar Separation und die Wake Turbulence Separation
**"Spacing"** meint den Abstand, den man (auf dem Endanflug) zwischen zwei Flugzeugen erreichen möchte. Dies hängt von vielen Faktoren wie z.B. dem Wetter, der aktuellen Verkehrssituation, dem Flugplatz, der Pilotenqualität ab.
In einer Anflugsequenz arbeiten wir also immer darauf hin, das gewünschte Spacing zu erreichen und dabei stets die Separation zu wahren.
**"Compression"** Grundsätzlich planen wir als Lotse so, dass die Separation bis zum Touchdown aufrechterhalten wird. Wenn wir also dem vorderen Flieger sagen, dass er 170 kts bis 5 NM vor der Piste halten soll, wird er danach auf seine finale Geschwindigkeit reduzieren. Währenddessen fliegt der hintere Flieger aber weiter mit 170 kts. Er holt also auf. Dieses Phänomen bezeichnen wir als "compression" oder "catch-up". In den meisten Fällen reicht es, eine Meile auf die benötigte Separation zu addieren.
Ein Beispiel: aufgrund der Flugzeugtypen brauchen wir 5 NM Wirbelschleppenstaffelung zwischen zwei Anflügen. Wir addieren also 1 NM und erhalten damit unser Spacing von 6 NM, das wir bis 5 NM vor der Piste aufrechterhalten.
#### Das richtige Spacing finden
Zusätzlich zu den oben genannten Kriterien gilt es noch einiges mehr zu beachten, um das richtige Final Approach Spacing zu finden.
Hierzu zählt z.B.:
- Das Layout des Flughafens und der Piste(n) - Wie viele Pisten hat der Flughafen? Werden diese nur für Landungen oder auch für Starts genutzt? Hat die Piste "High-Speed-Exits", die den Piloten erlauben die Piste schneller zu verlassen? etc.
- Das aktuelle Verkehrsaufkommen - Gibt es aktuell mehr In- oder Outbounds? Hier ist Kommunikation mit dem Tower gefragt!
- Das Wetter - Sind LVP in Betrieb?
- Piloten - Wenn du einem Piloten aufgrund deiner Erfahrung nicht zutraust, die Piste schnell genug zu verlassen, gib dem hinteren eine Meile mehr. Ein Go-Around ist in jedem Falle ineffizienter als eine Meile extra.
- Erfahrung - Beobachte stetig auch die Situation auf dem Boden. Schafft der Tower es mehrmals nicht eine Lücke von 5,5 NM für eine Departure zu nutzen, gib dem nächsten Flieger eine Meile mehr.
Generell gilt: Eine Lücke von 6 NM (+1 NM Compression = 7 NM Final Approach Spacing) reicht an den meisten Flughäfen gut aus, um einen Abflug starten zu lassen.
### Praktische Umsetzung
Jetzt müssen wir das Ganze in die Praxis umsetzen.
#### Speed Control
Grundsätzlich ist es (für den Anfang) erstmal ratsam, bei zunehmendem Work-/Trafficload, alle Flieger in deiner TMA auf eine einheitliche Speed zu nehmen. Hierfür bieten sich 220 kts an, weil so fast alle Flieger "clean" (ohne Flaps/Slats) fliegen können. Wenn alle Flieger gleich schnell unterwegs sind, ist es für dich am Anfang deutlich einfacher einen Plan zu entwickeln, weil du die Lücken lateral auf dem Scope erkennen kannst.
Um dem Piloten eine vernünftige Speed Reduction zu ermöglichen, sollten die Piloten möglichst nicht schneller als 200kts sein, wenn sie den Glideslope erreichen. Wichtig: Vergebene Speeds werden durch die Freigabe für den Anflug nicht aufgehoben. Das ist aber nicht überall so. Wenn du dir also unsicher bist, ob der Pilot das weiß, ist es womöglich besser ihm die Speed nochmal zu geben als später festzustellen, dass der Pilot seine Geschwindigkeit bereits reduziert hat.
Auf dem Final sind die mehrheitlich genutzten Werte **180 kts bis 6 NM / 170 kts bis 5 NM / 160 kts bis 4 NM**. Beachte: Gerade 180kts bis 6 NM können zu einem weniger genauen Endanflug führen, da die Piloten mit unterschiedlichen Flugzeugtypen unterschiedlich schnell auf ihren Final Approach Speed reduzieren. Sie fliegen dann also noch länger auf unterschiedlichen Speeds als bei 170kts bis 5 NM oder 160 kts bis 4 NM. Das kann am Ende die Differenz von 0,3 - 0,4 NM ausmachen.
Merke also: Sobald du merkst, dass dein Airspace voller wird und du nicht mehr alle Flieger direkt auf den Anflug bringen kannst reduziere alle Flieger frühzeitig auf eine Speed. Versuche insbesondere am Anfang bei den "Standard Speeds" zu bleiben und dich erst mit wachsender Erfahrung (wenn überhaupt) davon zu lösen.
#### Die richtige Höhe
Sehr wichtig ist auch der rechtzeitige Descent der Flieger. Man sollte damit rechnen, dass ein Flieger 300 ft pro NM (~1000 ft pro 3 NM) sinken kann. Wenn der Flieger über den Downwind geführt wird, sollte man als Faustformel beachten, dass er abeam des Platzes nicht höher als 8000 ft sein sollte, sonst ist er eindeutig zu hoch, um ihn auf einen 10 NM Final zu drehen. Wenn du merkst, dass der Pilot zu hoch für deine weiteren Planungen ist, gibt es mehrere Möglichkeiten dem entgegenzuwirken. Du könntest dem Piloten die grobe Distanz mitteilen, die er noch fliegen muss (siehe dazu auch das nächste Kapitel). Dann kann er selber dafür sorgen, schneller oder langsamer zu sinken. Andernfalls kannst du ihm auch eine Sinkrate anweisen. Warte hierbei aber nicht zu lange, denn auch mit Speedbrakes können Flugzeuge nicht unbegrenzt stark sinken.
Mit der Freigabe für den Anflug dürfen Piloten auf die veröffentlichte Höhe für den Anflug sinken. Möchte der Lotse, dass der Pilot auf einer anderen Höhe auf den Anflug fliegt, muss dies explizit dazugesagt werden.
#### Erreichen der gewünschten Abstände
Um die Distanz der Flieger bis zum Touchdown abschätzen zu können, schau dir einen Flieger an, der bereits auf dem ILS ist. Dann musst du dir überlegen, welches Spacing du aktuell brauchst. Hast du also (wie in dem obigen Beispiel) ein Final Approach Spacing von 7 NM, fängst du bei dem ersten Flieger an und zählst in 7er-Schritten rückwärts. Ist der erste Flieger also bei 13 NM, muss der Nächste bei gleicher Geschwindigkeit genau 7 nm mehr (=20 NM) fliegen. Die dahinter entsprechend 27, 34, 41 NM etc.
[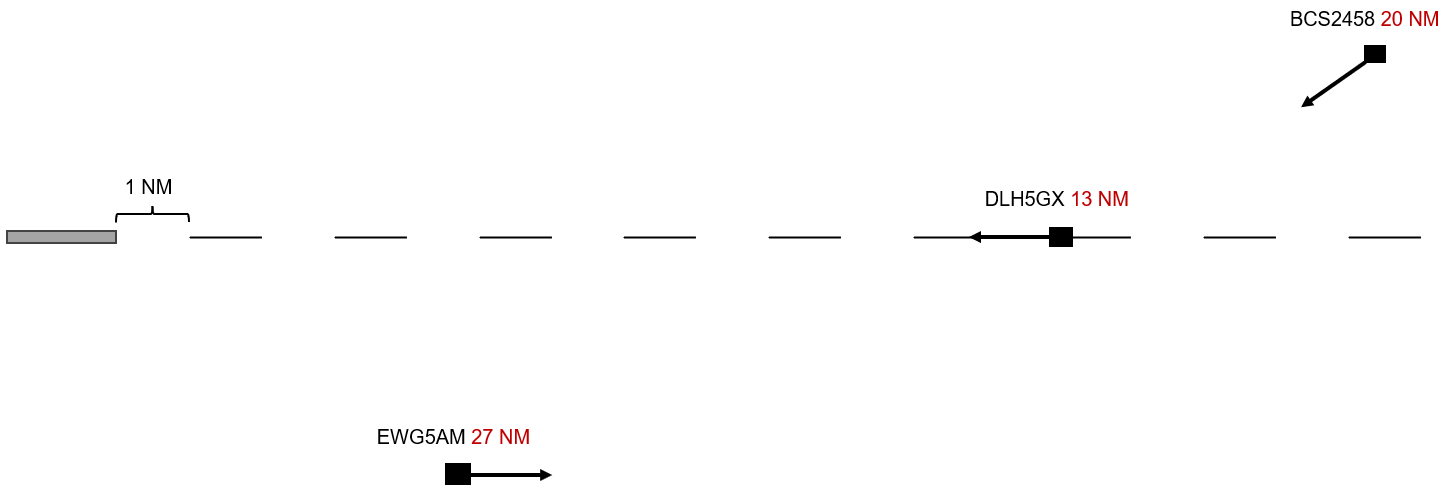](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/distancemeilen.png)
Um dies zu erreichen, gibt es verschiedene Möglichkeiten, Verfahren und Tipps:
##### Downwind
Der Downwind verläuft parallel, in entgegengesetzter Richtung zum Final und sollte ca. 5 NM vom Final entfernt sein. An vielen Flughäfen gibt es bereits Arrivals oder Transitions, die genauso aufgebaut sind. Die Flieger sollten nicht schneller als 220 KIAS sein, damit sie beim Turn auf das Final nicht überschießen.
Wenn man den nachfolgenden Flieger dreht, wenn der vorausfliegende (der bereits auf dem LOC established ist) abeam ist, wird das zu einem Abstand von 5,5-6 NM zwischen diesen beiden Fliegern auf dem ILS führen (*Abbildung* *1*), wenn beide Flieger die gleiche Geschwindigkeit haben. Gemeint ist der Zeitpunkt, an dem der Flieger dreht, nicht dort, wo man also Lotse mit dem Sprechen beginnt - mit der Anweisung muss man also schon früher beginnen. Wenn man den Flieger dreht, wenn er 0,5 NM nach abeam ist, dann wird man 1 NM mehr Abstand bekommen, da der Flieger die 0,5 NM ja auch wieder "zurück" fliegen muss (*Abbildung* *2*). 1 NM mehr Downwind wird in 2 NM mehr Flugstrecke enden. Den Flieger zu drehen, wenn er 0,5 NM vor abeam ist, wird somit in 1 NM weniger Abstand enden. Mit dieser Faustregel kann man jeden gewünschten Abstand errechnen. Probiere dich hier einfach etwas aus und arbeite für das Fine-Tuning mit etwas früherer/späterer Speed Reduction.
[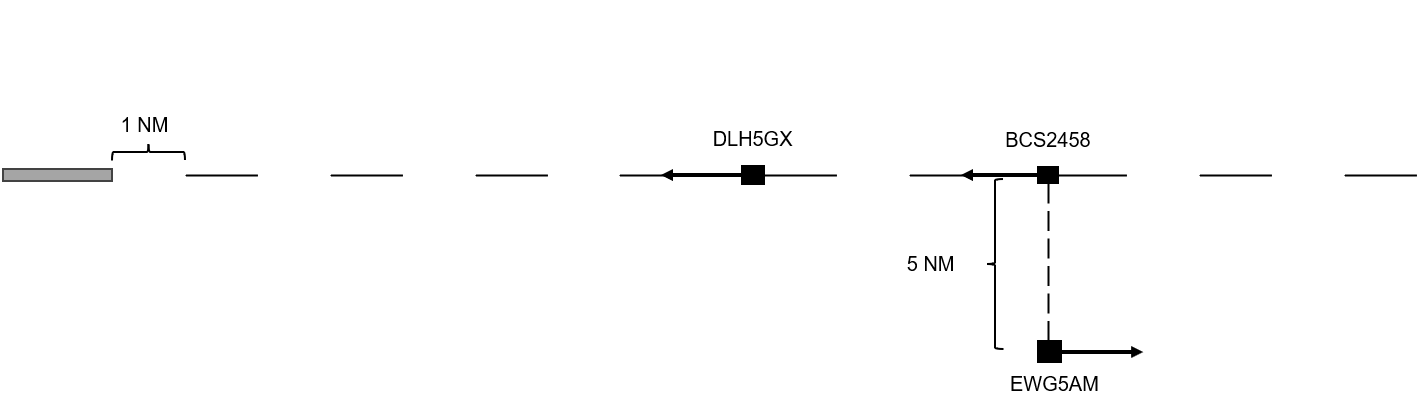](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/6meilen.png)
*Abbildung 1*
*[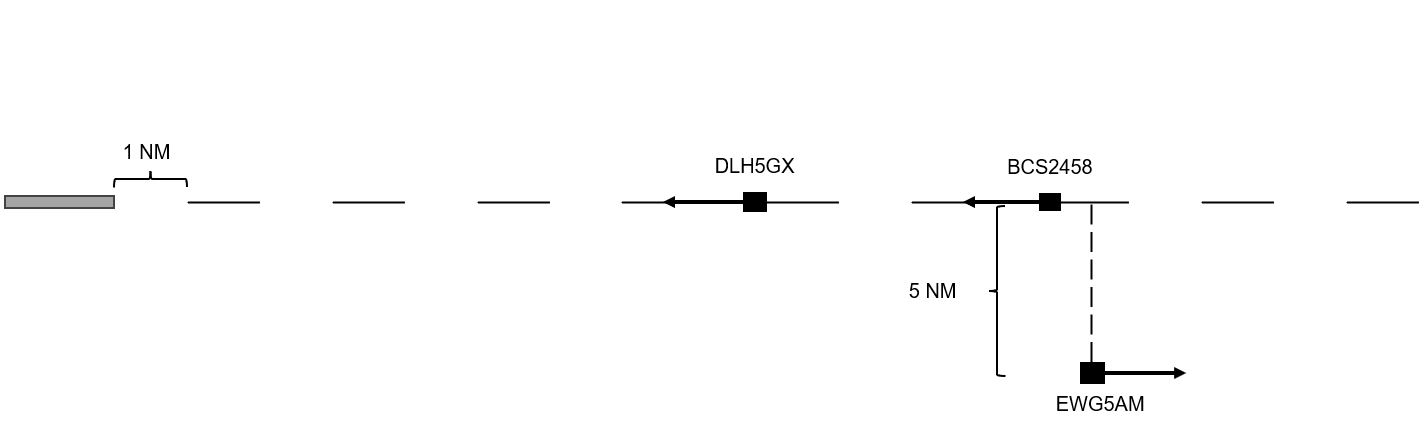](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/61meilen.png)*
*Abbildung 2*
Wenn der Flieger nur zwei Radar-Updates (10 Sekunden) später auf den Endanflug gedreht wird als geplant, hat dieser in der Zeit bereits 1 NM zurückgelegt. Dies führt dazu, dass 2 NM mehr geflogen werden müssen, was man mit Geschwindigkeiten nur selten korrigieren kann. Bei 30 Sekunden resultiert dies in 6 NM mehr Flugweg und reduziert die Kapazität einer Piste um 50 %. Dieses Beispiel zeigt eindrücklich, warum deine **Priorität immer auf dem Final** liegen muss!
##### Base
Den Base Leg kannst du je nach lokalen Gegebenheiten und Verkehr verwenden, um die Flieger vom Downwind auf den Final zu drehen (*Abbildung* *1*) oder auch um Flieger mehr oder weniger "direkt" auf den Final fliegen zu lassen (*Abbildung* *2*).
[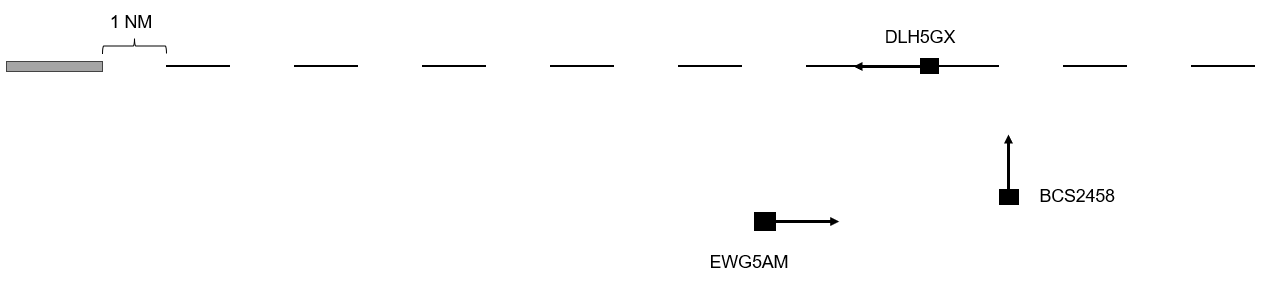](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/base3.png)
*Abbildung 3*
[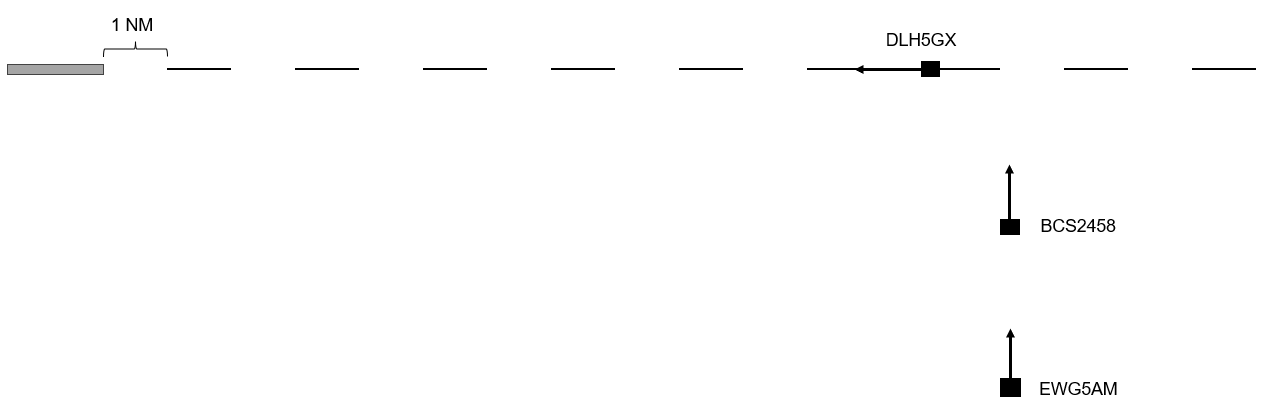](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/base1.png)
*Abbildung 4*
Wenn du dir die Abbildungen genauer anschaust, siehst du, dass die Distanz von der BCS2458 (und EWG5AM in Abb. 2) relativ zum Endanflug gleich bleibt. Die einzige variable Distanz ist die, sich westlich in Richtung Piste bewegende, Lufthansa. Der Base Leg sollte deshalb bei beiden Varianten möglichst in einem Winkel von mehr oder gleich 90 zum Final sein. Ansonsten können Situationen wie in *Abbildung 5* auftreten. Hier nimmt die Distanz von DLH5GX bis zur Piste ab, die Distanzen von BCS2458 und EWG5AM hingegen nehmen zu. Mit jedem Update des Radars ändert sich der Abstand im Verhältnis zum Anflug. Das macht es sehr viel schwieriger, die Flieger präzise hintereinander auf den Endanflug zu drehen.
[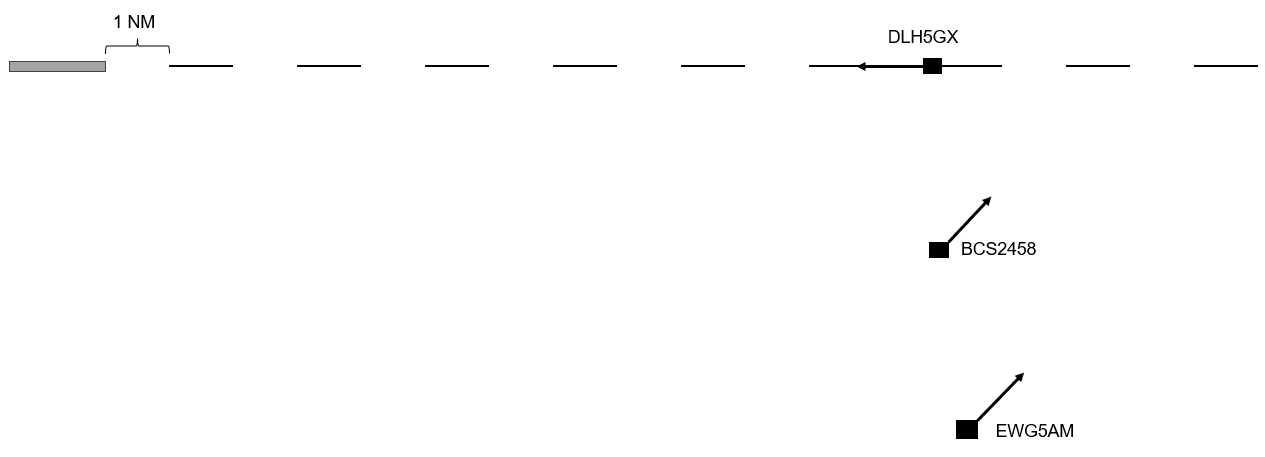](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2024-02/base2.png)
*Abbildung 5*
##### Endanflug
Das Ziel des/der Approachlotsen sollte es sein, alle Flieger an mehr oder weniger demselben Punkt auf den Endanflug fliegen zu lassen. Hierfür ist es wichtig, dass, wenn vorhanden, der Feeder nicht zu wenig, aber auch nicht zu viele Flieger bekommt. Bei ersterem verschiebt sich der Intercept-Punkt weiter zum Airport, bei zweiterem weiter weg.
Natürlich wird man es nicht schaffen, jeden Flieger an genau demselben Punkt intercepten zu lassen. An den meisten deutschen Flughäfen sind jedoch 10-15 NM ein guter Richtwert. Generell sollte aber auf Vatsim das Ziel sein, ein möglichst kurzes Final zu haben, da sich so zum Beispiel technisch bedingte Unterschiede bei Winden oder Speeds weniger bemerkbar machen.
### Adaptionen
#### Langsame Flugzeuge
Was relativ schwierig ist ist, wenn ein Flieger in die Sequence integriert werden muss, der deutlich langsamer auf dem Final unterwegs sein wird als der Rest. Grundsätzlich sollte man auch hier versuchen den Flieger einen möglichst kurzen Endanflug fliegen zulassen. Denn wenn die Flieger über 20 NM mit einer Geschwindkeitsdifferenz von 60 oder mehr Knoten fliegen, dann wird deutlich mehr Platz verschenkt als bei 8-10 NM. Dazu sollte der Flieger stets in der Nähe des ~10 NM Finals gehalten werden. Z.B. indem man ihn dort Kreise fliegen lässt. Wenn sich dann die Gelegenheit bietet, kann man ihn dann dazwischen quetschen. Wie viele Meilen brauche ich dann zum nächsten Flieger? Das kann man wieder mit der Formel ausrechnen:
Speed-Differenz / 60 = Verlust an Spacing pro Minute
Wenn also der Slow Type mit 120 KTS auf dem ILS fliegt und auf einen 8 NM Final gecleared wird braucht er ca. 4 Minuten bis zum Touchdown. Wenn der nachfolgende Traffic im Schnitt mit 180 KTS fliegen wird, nimmt er dem Slow Type pro Minute eine Meile ab. Er muss also wenigstens 4 NM mehr als die benötigte Separation haben, um nicht auf den Slow Type aufzufliegen. Bei so einer Konstellation sollte man aber immer auf der sicheren Seite sein, also lieber ein zwei Meilen mehr als zuwenig.
Ein weiterführendes Video mit einer interessanten Herangehensweise gibt es hier:
[https://youtu.be/VNcSB-c6atU?si=Wo2vHTW9Dgm0zHE6](https://youtu.be/VNcSB-c6atU?si=Wo2vHTW9Dgm0zHE6)
#### Wind
Der Wind kann sich auch auf die Headings auswirken, die für den Downwind oder Base verwendet werden. Für eine Ost-West Piste mit Westwind, der die Flugzeuge nach Osten treibt, muss ein Heading für den Base von eigentlich 360° möglicherweise 5 oder sogar 10 Grad nach links korrgiert werden. Ein Heading von 180° nach rechts. Ein Blick auf Tools wie windy.com, die den Wind auch in der Höhe anzeigen, kann helfen zu beurteilen, welche Auswirkungen der Wind haben könnte.
Bei starkem Gegenwind im Endanflug ist es wichtig, dass die Flieger nicht zu früh oder zu spät auf den Endanflug gedreht werden. Sobald das Flugzeug auf das Intercept-Heading eindreht beginnt die Geschwindigkeit über Grund zu sinken. Wenn das hintere Flugzeug zu früh gedreht wird, kann mit Speed Control weniger bewirkt werden als bei Windstille. Wird der Flieger zu spät gedreht ist es mit Gegenwind deutlich schwieriger, die Lücke wieder zufliegen zu lassen. Außerdem fliegt der Flieger mehr Strecke im Final Turn.
Überlege dir an dieser Stelle einmal, welche Auswirkungen der Wind hat, wenn er senkrecht zum Anflug ist (Bei Ost-West Piste also z.B. von Norden oder Süden). Was macht es für einen Unterschied auf dem Base wenn Flieger aus der einen Richtung Rücken- und aus der anderen Richtung Gegenwind haben (auch wenn alle bspw. 220kts fliegen)?
Überlege dir also ggf. schon vor dem Einloggen, welche Anpassungen Sinn ergeben könnten und schau dann mit den ersten Flieger wie es passt.
#### Piloten
Mit etwas Erfahrung kannst du meist bereits beim ersten Kontakt mit einem Piloten einschätzen, ob dieser neu und/oder nicht vertraut mit seinem Flugzeug ist. Berücksichtige das bei deinen Planungen und Anweisungen.
Gib einem neuen Piloten also ruhig ein, zwei Meilen mehr auf dem Final, bedenke bei Anweisungen, dass diese ggf. mit etwas Verzögerung umgesetzt werden und verschwende nicht deine Zeit damit Piloten für Fehler anzumeckern. Sorge lieber dafür, dass du die Situation löst.
Es ist nicht alles verloren wegen eines Piloten!
# Holding Management
Es kann diverse Gründe geben, warum man ein Holding aufmachen muss. Eine Möglichkeit ist, dass der Arrival es einfach nicht mehr schafft, bei einem Inbound Rush das nötige Spacing zwischen die Arrivals zu bekommen. Dann benutzt man das Holding als Mittel zum Herstellen von Spacing.
Eine andere Möglichkeit ist, dass der APP einfach keine Flieger mehr nimmt, da z.B. die Runway geschlossen ist.
### Holding beginnen
Das Holding wird immer vom CTR Controller gemanaged. Wenn man weiß, dass man ein Holding aufmachen muss, lässt man in der Regel alle Flieger, die noch auf den Holding Fix zufliegen, auf "Minimum Clean Speed" zu reduzieren, damit sie möglichst wenig Zeit im Holding verbringen müssen. Das ist nämlich wirtschaftlicher.
Sicherzustellen hat man, dass alle Flieger mit 1000 ft Staffellung beim Holding Fix ankommen, also zur Sicherheit im Descent mit Raten arbeiten.
> HOLD AT / OVER (significant point, name of facility or fix) MAINTAIN / CLIMB / DESCEND (level) \*(additional instructions, if necessary)\* EXPECT FURTHER CLEARANCE AT (time) / IN (minutes) / EXPECTED APPROACH TIME (time)
Dem Flieger sollte grundsätzlich mitgeteilt werden, wo und wie hoch er in das veröffentlichte Holding fliegen soll. Zusätzlich muss bei einem erwarteten Verbleib im Holding von mehr als 20 Minuten eine expected approach time (EAT - Zeit wann das Holding verlassen wird) ausgerechnet und diese dem Piloten mit der holding instruction übermittelt werden. Bei Militärfliegern (1-2 sitzige Jets) muss die EAT unabhängig von den 20 Minuten immer dazu, da diese i.d.R. ihren Sprit sehr knapp kalkulieren und damit ggf. direkt zum Alternate ausweichen müssen. Zusätzlich muss der Pilot immer dann informiert werden, wenn eine neue bekannte EAT von der zuvor übermittelten um 5 Minuten oder mehr abweicht.
> DLH123, hold over SPESA, maintain FL130, expected approach time 1230.
Neben der hier gezeigten *general holding instruction* gibt es auch noch eine *detailed holding instruction*. Diese beinhaltet die folgenden Punkte:
1. holding fix
2. holding level
3. inbound magnetic track to the holding fix
4. direction of turns
5. time along outbound leg or distance values, if necessary (up to FL140 1 minute, at or above FL150 1.5 minutes)
6. time at which the flight can be continued or a further clearance can be expected
Es gilt, dass immer general holding instructions gegeben werden, außer, einer der folgenden Punkte ist erfüllt:
- Der Pilot muss einer anderen holding procedure als der veröffentlichten folgen
- Der Pilot meldet, dass er die published holding procedure nicht kennt
- Der Pilot muss über einem Punkt ins holding, für den kein holding procedure veröffentlicht ist
Für die Übersichtlichkeit der Flieger im Holding können das Callsign und die Höhe in den Tags bei der Nutzung von Topsky farbig hinterlegt werden.
### Holding Kapazität
Ein Holding sollte übrigens nicht zu hoch werden. Wenn so viele Flieger halten müssen, dass das Holding über FL200 reichen würde, muss man sich langsam Gedanken darüber machen, noch ein zweites Holding aufzumachen, dass aber genug Abstand zum ersten haben muss. Sowas wird auch gerne als "Enroute Holding" bezeichnet. Wenn das im eigenen Sektor nicht mehr möglich ist, muss der angrenzende Center Sektor ein Holding aufmachen, da man von ihm keine Inbounds mehr nimmt.
### Holdings auflösen
Wenn die Flieger alle im Holding kreisen ist natürlich nichts wirklich schweres daran, aber eine regelrechte Kunst wird es, wenn der APP wieder Flieger nimmt, und man diese sinnvoll mit 10 NM Spacing an den APP übergeben muss. Dass die Flieger noch im Holding an den APP übergeben werden, der sich die Flieger dann rausnimmt, macht nur dann Sinn, wenn der APP mindestens die untersten 3-4 Flieger auf der Welle hat. Denn nur dann kann er sich die Flieger sinnvoll in eine Sequence bringen, ohne dass massig Platz verschenkt wird. Am besten ist es, dass der CTR das Exit aus dem Holding managed, und die Flieger dann erst an den APP übergibt (wohin der CTR die Flieger clearen soll muss ggf. koordiniert werden).
Eine schlechte Taktik ist sicherlich, einfach jeden Flieger sein Holding zuende fliegen zu lassen und erst dann weiter zu clearen. Damit sind nämlich die angestrebten 10 NM Spacing, wenn es denn überhaupt mal hinhaut, absoluter Zufall.
Um das besser zu gestalten, muss man sehr viel vorausdenken: Den Flieger, der als nächstes aus dem Holding raus soll, muss man rechtzeitig sagen, dass er auf dem Outbound Heading bleiben soll. Das ist quasi der "Downwind" des Holdings. Wenn er jetzt kurz nach dem Abeam-Point zum preceeding Traffic ist (der bereits auf den Holding Fix zufliegt, also quasi im "Final" des Holdings ist), dreht man ihn einfach hinterher, und sollte dabei ziemlich genau 10 NM herausbekommen. Das ist deshalb so viel mehr als beim Vectoring auf das ILS, weil die Flieger je deutlich höher sind und deshalb eine höhere GS haben (obwohl sie ja auch mit ca. 220 KIAS fliegen). Zu diesem Zeitpunkt muss man bereits die entsprechende Maßnahme für den Flieger eingeleitet haben, der nach dem gerade auf den Holding Fix zurückgedrehten Flieger dran kommt. Es hat also wirklich sehr viel mit Vorausplanung zu tun.
Sehr wichtig ist auch, dass man immer schnell mit den Levels nachzieht. Sobald ein Flieger das Holding verlassen hat cleared man also den Flieger darüber auf sein Level. Diesen kann man dann z.B. das Erreichen dieses Levels reporten lassen, damit man dann sofort den Flieger darüber nachziehen kann, und es nicht vergisst.
Das "Leerräumen" eines Holdings ist also fast genauso etwas wie das Feeden auf das ILS. Es gibt einen Downwind und ein Final, man muss aber zusätzlich immer aufpassen, dass die Flieger rechtzeitig angwiesen werden, das Outbound Heading zu halten, denn wenn man es einmal verpennt hat verliert man ettliche Meilen.
### Dauer der Holdings
Holdings sollten nur so lange wie nötig genutzt werden, damit der Arrival nicht leer läuft. Hier muss zwischen APP und CTR koordiniert werden, wie lange die Flieger vezögert werden sollen. Oft ist bereits eine Runde im Holding ausreichend (etwa 4 bis 5 Minuten), dass wieder mehr Kapazität vorhanden ist.
Hierfür hilft es sich zu überlegen bzw. messen, wann der letzte Flieger beim APP auf dem Final ist. Unter Berücksichtigung der verbleibenden Wegstrecke für die Inbounds, kann der Abbau des Holdings geplant werden.
### Weiterführende Links
- **Skybrary:** [Holding Pattern](https://www.skybrary.aero/articles/holding-pattern "Skybrary - Holding Pattern") (englisch)
# Low Visibility Operations (LVO) - Arrival
Bei schlechten Sichtbedingungen müssen die Verfahren vom Lotsen am Flughafen angepasst werden, um weiterhin einen sicheren Betriebsablauf zu ermöglichen.
Lotsenseitig wird dabei jedoch nicht in CAT II oder CAT III Operations unterschieden. Der Pilot muss anhand der vorherrschenden RVR und Hauptwolkenuntergrenze selbst entscheiden, welchen Anflug er fliegen kann.
Low Visibility Operations werden bei einer **Pistensichtweite** (RVR) von **gleich oder** **weniger als 600 m**, und/oder bei einer **Hauptwolkenuntergrenze** (BKN / OVC) von **weniger als 200 ft aktiv** oder wenn keine Vertikalsicht vorliegt.
Die Staffelung zwischen zwei anfliegenden oder einem an- und einem abfliegenden Luftfahrzeug muss vergrößert werden, sodass die ILS-Signale durch an- und abfliegenden Verkehr sowie durch rollende Luftfahrzeuge oder Fahrzeuge am Boden nicht gestört werden.
Anflügen muss zusammen mit der Freigabe für den Anflug die vorherrschende RVR genannt werden. Welche ILS-Kategorie genutzt wird, obliegt dabei dem Piloten und wird somit nicht in der Freigabe genannt.
> DLH123, turn left heading 220, cleared ILS runway 25L, RVR 300 metres.
Je nach Verkehrsaufkommen kann es sein, dass die Abstände zwischen den Anflügen erhöht werden müssen um Fehlanflüge zu vermeiden.
# Center
# Conflict detection
#### Definitions
**Conflict.** Predicted converging of aircraft in space and time which constitutes a violation of a given set of separation minima.
**Conflict detection.** The discovery of a conflict as a result of a conflict search.
**Conflict search.** Computation and comparison of the predicted flight paths of two or more aircraft for the purpose of determining conflicts.
*Source: ICAO Doc 9426*
#### Description
Detecting conflicts between aicraft is an important part of the air traffic controller job and arguably the most complex one. Once a conflict is properly identified the resolution is relatively straightforward - the controller chooses an appropriate method (e.g. level change, [vectoring](https://www.skybrary.aero/index.php/Basic_Controller_Techniques:_Vectoring " Vectoring"), [speed control](https://www.skybrary.aero/index.php/Basic_Controller_Techniques:_Speed_Control " Speed Control"), etc.), implements the plan and monitors aircraft compliance. If the situation remains undetected, however, this may result in [loss of separation](https://www.skybrary.aero/index.php/Loss_of_Separation "Loss of Separation"), late (and more abrupt) manoeuvres, [STCA](https://www.skybrary.aero/index.php/Short_Term_Conflict_Alert_(STCA) "Short Term Conflict Alert (STCA)")/[TCAS](https://www.skybrary.aero/index.php/Airborne_Collision_Avoidance_System_(ACAS) "Airborne Collision Avoidance System (ACAS)") activation or worse.
If all aircraft are assigned different levels, and are not expected to climb or descend, then there are no conflicts. Most commercial operations however take place in the [RVSM](https://www.skybrary.aero/index.php/Reduced_Vertical_Separation_Minima_(RVSM) "Reduced Vertical Separation Minima (RVSM)") layer which means that this situation is unlikely. Therefore, normally the first thing to be done in a surveillance environment, is a "**same level scan**", i.e. looking for aircraft that are maintaining the same level. This initial step identifies aircraft that need further examination. The second phase is to discard the pairs that are "obviously" non-conflicting, e.g. flying at the same speed to the same point with long distance between them, those whose paths do not cross, etc. After that, the minimum distance of the "suspicious" pairs is determined and, if necessary, a plan for solving the conflict is created.
Climbing and descending flights present a special challenge as they require more checks to be done, e.g.:
- Does the current level cause conflicts?
- Will the final level for the sector cause a conflict (within the sector or at the exit point)?
- Will any of the intermediate levels cause a conflict within the sector?
- Will the aircraft be able to reach its planned level before the exit point? If not, will this cause a conflict in the next sector?
These checks may become more complex if the aircraft climbs or descends through a high number of flight levels (e.g. climbing from FL 140 up to FL 360). This results in significant change in [groundspeed](https://www.skybrary.aero/index.php/Ground_Speed "Ground Speed") (due to [wind](https://www.skybrary.aero/index.php/Wind "Wind") and [IAS](https://www.skybrary.aero/index.php/Indicated_Airspeed_(IAS) "Indicated Airspeed (IAS)") variations) which hinders precise calculations.
Factors that help controllers detect conflicts are:
- system support (see section below)
- discipline, i.e. performing structured scan of the aircraft that are, or will be under control and evaluation of the impact of each flight profile change
- fixed-route environment. This usually means that there are fixed "hotspots" (normally where airways cross). An experienced controller can often detect a conflict by knowing that when there is an aircraft at point A then if the other one is at point B they will be in conflict at point C.
- recurrent training for non-routine situations
Factors that may cause a conflict to be missed include:
- **Strong winds** (e.g. 50-100 kt or more). These may alter aircraft speeds in such a way that a [BOEING 737-300](https://www.skybrary.aero/index.php/B733 "B733") becomes faster than a [AIRBUS A-380-800](https://www.skybrary.aero/index.php/A388 "A388") in terms of groundspeed. Also, aircraft flying at different tracks will be affected differently. As a consequence, pairs that seem to be safely separated may be in conflict.
- **[Free route environment](https://www.skybrary.aero/index.php/Free_Route_Airspace_(FRA) "Free Route Airspace (FRA)").** This means that the "standard" hotspots are no longer relevant and a situation may arise anywhere. While free route generally reduces the number of conflicts it makes them harder to identify.
- **"Irregular" aircraft**, i.e. such that form a small fraction of the traffic flow and can be overlooked due to e.g. high [workload](https://www.skybrary.aero/index.php/Controller_Workload "Controller Workload") or [complacency](https://www.skybrary.aero/index.php/Complacency "Complacency"). Examples of these are **non-RVSM aircraft** in RVSM space, **slow-flying business jets**, **slow-flying aircraft** at lower levels (interfering with arriving and departing aircraft), non-routine situations (e.g. aicraft dumping fuel, military interception), etc.
- [Deviation from procedures](https://www.skybrary.aero/index.php/Violation "Violation"), e.g. provision of ATS outside the area of responsibility, skipping "unnecessary" [coordinations](https://www.skybrary.aero/index.php/ATC_Unit_Coordination "ATC Unit Coordination"), etc.
- **[Aircraft avoiding weather](https://www.skybrary.aero/index.php/Loss_of_Separation_During_Weather_Avoidance "Loss of Separation During Weather Avoidance")** are a special challenge, because their behaviour is less predictable and trajectory updates cause increased controller workload. If the controller does not update these, however, system support tools may be less useful.
- **[Airspace boundaries](https://www.skybrary.aero/index.php/Conflict_Detection_with_Adjacent_Sectors "Conflict Detection with Adjacent Sectors")** are areas where conflicts are sometimes detected late. This can be caused e.g. by poor coordination, improper colour representation, etc.
- **[Blind spots](https://www.skybrary.aero/index.php/Blind_Spots_%E2%80%93_Inefficient_conflict_detection_with_closest_aircraft "Blind Spots – Inefficient conflict detection with closest aircraft")** - a controller may examine the future path of an aircraft failing to notice the conflicting one which is just above (or below)
- **Improper** [**handover/takeover**](https://www.skybrary.aero/index.php/The_Handover-Takeover_Process_(Operational_ATC_Positions) "The Handover-Takeover Process (Operational ATC Positions)"). The relieving controller normally expects all conflicts to be solved or at least detected and having a planned solution. If this is not the case, or if the controller being relieved fails to pass the information, it is possible that the new controller focuses on the medium and long-term situations and misses a near-term conflict.
source: www.skybrary.aero
# Conflict Solving
This article describes the typical methods and controller actions used to solve conflict between aircraft in a surveillance (mostly en-route) environment. Only situations with two participating aircraft are considered. Although more complex scenarios (involving three or more aircraft) do exist, they happen rarely and in most cases can be considered as multiple two-aircraft cases that happen at the same time.
In broader terms, a conflict is a situation where the separation at the [closest point of approach](https://www.skybrary.aero/index.php/Closest_Point_of_Approach_(CPA) "Closest Point of Approach (CPA)") will be less than the specified minimum and one of the following exists:
- Two aircraft are flying at the same level. In this case, doing nothing will result in a [Loss of Separation](https://www.skybrary.aero/index.php/Loss_of_Separation "Loss of Separation"). There are two sub-scenarios to this:
- Crossing conflict - the two aircraft's paths cross at some point and diverge afterwards.
[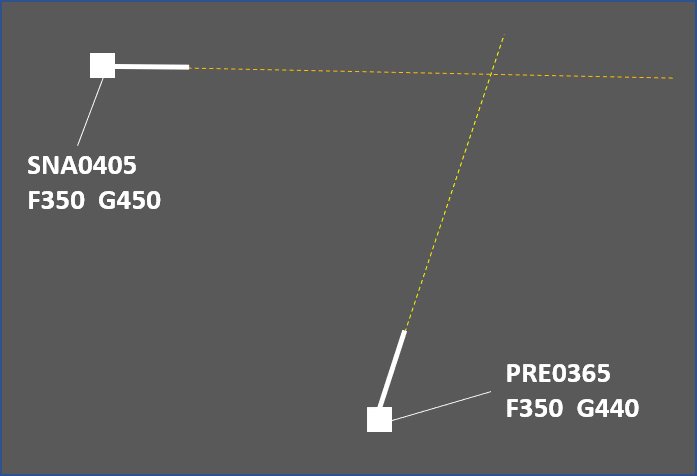](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/conflicts-1.png)
- Converging conflict - the two aircraft's paths join at some point and remain the same afterwards, at least for a portion of the flight.
[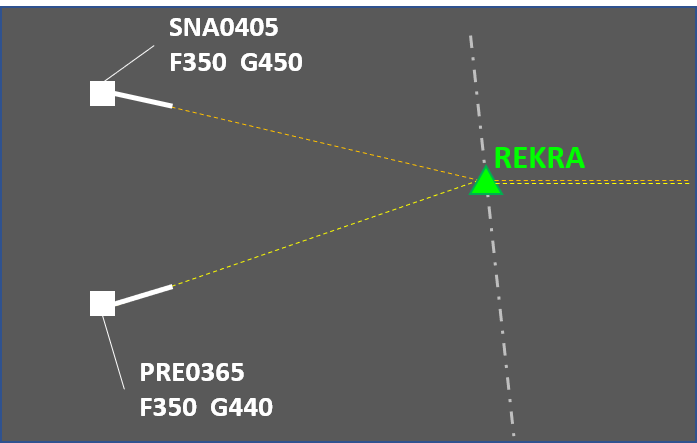](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/conflicts-2.png)
- At least one of the aircraft is climbing or descending to a level that will make it cross the other aircraft's level. In this case, doing nothing *may* lead to a loss of separation depending on the circumstances (e.g. vertical speed, distance between the aircraft, current vertical separation, etc.)
- The two aircraft are vertically separated but at least one of them needs to be cleared to a level that would cross the other's level (e.g. due to reaching the top of descent). Here, doing nothing will *not* cause loss of separation. However, improper timing of the instruction to change level may lead to this.
The second and the third situation usually happen near the transition between approach and area control. This is where departing aircraft reach their cruising level and arrivals start preparation for the final portion of the flight. The first one is more typical to the cruising part of the flight.
Action to be taken by the controller in order to eliminate the risk of separation breach depends on a number of factors such as the type of conflict, the specific circumstances, the available aircraft performance, controller workload, etc. The most common methods for solving conflicts are:
- [Level change](https://knowledgebase.vatsim-germany.org/books/enroute-study-guide/page/level-change). This solution is typically used for conflicting aircraft in level flight. In the crossing case, an opposite level may be used for a short time and then the aircraft will climb again to its cruising level. This is not an option in the converging scenario, meaning that the level change needs to be at least 2000 feet. Sometimes it is possible to use opposite levels for converging conflicts but this requires [coordination](https://knowledgebase.vatsim-germany.org/books/coordination "ATC Unit Coordination") with the downsteam sector or unit.
[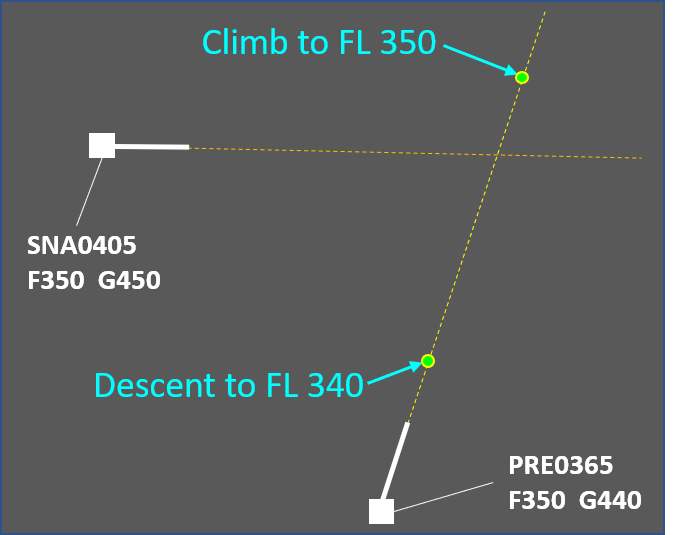](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/conflicts-3.png)
An example of using a 1000 ft level change to solve a crossing conflict
- [Speed control](https://knowledgebase.vatsim-germany.org/books/enroute-study-guide/page/speed-control). This method is mostly suitable for solving medium-term conflicts (as the instruction takes time to "produce" separation) and for maintaining already achieved separation. A major limiting factor is the typical cruising speed. For example, trying to sequence an [AIRBUS A-380-800](https://www.skybrary.aero/index.php/A388 "A388") behind a [BOEING 737-800](https://www.skybrary.aero/index.php/B738 "B738") would likely be impracticle (though not impossible). Additional factor to consider with speed control is that the results are not as obvious as for example with level change or vectoring. This means that the controller will need to monitor the situation more frequently to make sure that (a) the flight crews comply with the instructions and (b) the speeds are not affected by changing winds. On the other hand, this method normally results in the slighest intervention of the flight plan - the trajectory and vertical profile are not changed.
- [Vectoring](https://knowledgebase.vatsim-germany.org/books/enroute-study-guide/page/vectoring " Vectoring"). This is a universal method that may solve any conflict unless additional factors (such as airspace restrictions or adverse weather) limit the available headings. This benefit comes at a cost, however - vectoring usually extends the distance flown (and hence, delays the flight). This effect may sometimes be mitigated by providing a direct routing after the conflict has been solved.
- Direct routing. This method is somewhat similar to vectoring because it relies on the aircraft track being changed to an extent where the horizontal separation will no longer be reduced below the minimum. While this method has limited applicability (the results depend mostly on the flight planned route) it often contributes to flight efficiency by reducing the distance to be flown. Other benefits are that the results from the controller intervention are immediately visible and that a single message solves the conflict altogether (unlike with most other methods that follow the instruct-monitor-resume routine). There are some downsides to this solution however, e.g.:
- Depending on the specific circumstances, the flight may enter an area with strong headwinds (which the pilot tried to circumvent with the longer flight planned route).
- In most cases the flight needs to be cleared to a point that is far away which in most cases means a coordination with the next sector or unit will be necessary. This increases controller workload and also adds an element of uncertainty (the next sector controller may not approve the direct routing).
- A direct routing may solve one conflict but create another at the same time.
- [Vertical speed adjustment](https://knowledgebase.vatsim-germany.org/books/praktische-verfahren/page/vertical-speed " Vertical Speed"). This technique is used in situations where an aircraft needs to safely cross another aircraft's level. If properly used, it provides safe and efficient flow of traffic. The rates of climb or descent to be assigned need to be carefully calculated to accomodate some non-compliance (e.g. if the controller assigns a rate of climb of 1500 feet per minute or greater but the aircraft actually climbs at 1300). Also, while descent rates are usually achieveable, climbing at a specified vertical speed may be outside the aircraft capability and therefore the restriction should be coordinated with the flight crew.
A combination of the methods above is sometimes used. Here are some examples:
- Using vectoring to ensure horizontal separation is maintained and assigning vertical speed so that vertical separation is achieved faster (and the vectoring may be terminated sooner). This is useful for separating departing and arriving aircraft.
[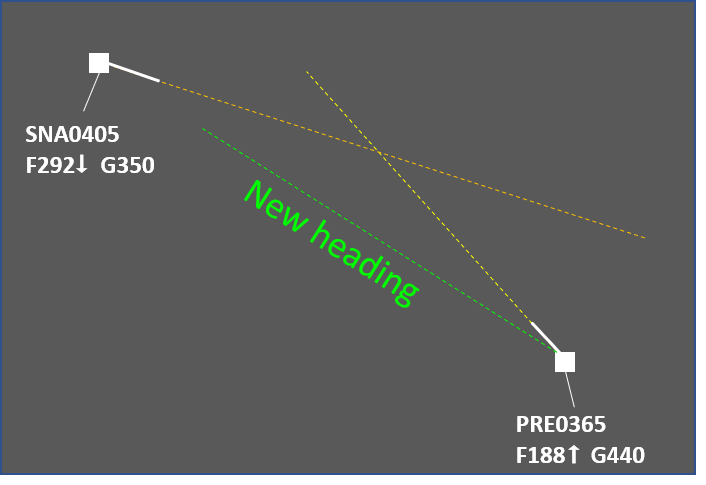](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/conflicts-4.png)
An example of using vectoring and vertical speed control. Turning PRE0365 provides safety and assigning vertical speeds results in efficiency as the flight can be returned onto the flight planned route sooner.
- Combining vectoring and speed control may result in a smaller overall intervention as opposed to using vectoring only.
- Combining a direct routing (that makes the converging conflict a crossing one) with a level change. The benefit is that 1000 ft temporary level change may be sufficient as opposed to 2000 feet change for a longer period of time. Note that the direct routing may need to be coordinated.
[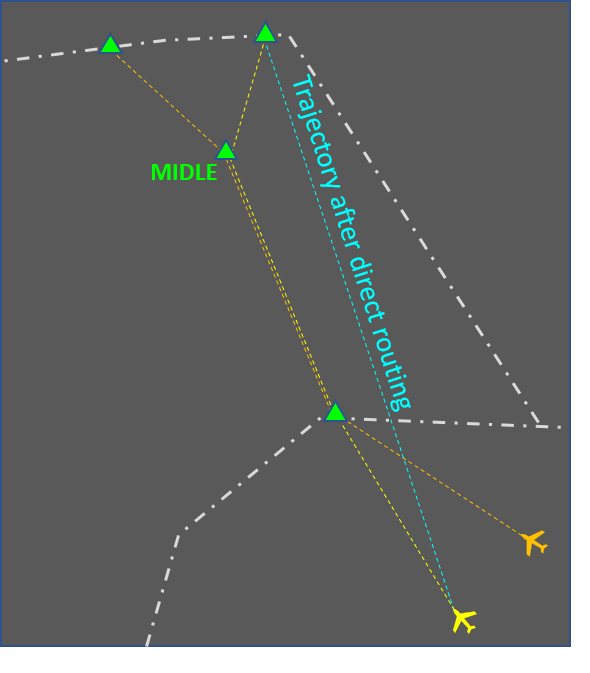](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/conflicts-5.png)
An example of using a direct route and a level change. Initially, the conflict is of the converging type. By clearing the yellow aircraft to fly on a direct route, the controller does not solve the conflict but now has the option to use 1000 ft level change for a few minutes as opposed to 2000 ft until point MIDLE.
Combined solutions need to be carefully considered. These usually increase the flight crew workload. In some cases the instructions may even be incompatible. An example of this is assigning a high rate of descent to an aircraft that has already been instructed to reduce speed.
Source: [www.skybrary.aero](https://www.skybrary.aero)
# Vectoring
This article describes the use of vectoring by air traffic controllers to manage the traffic flow and [resolve conflicts](https://www.skybrary.aero/articles/conflict-solving "Conflict Solving"). It is **focused on the en-route phase** and describes the general principles, typical uses and associated risks. The article also gives some advice about the practical use of the vectoring method. Note that the advice is based mostly on good practices and experience, and is in no way intended to replace or supersede local procedures and instructions.
#### Description
The goal of vectoring is to have the aircraft achieve and maintain the desired [track](https://www.skybrary.aero/articles/heading-track-and-radial "Heading, Track and Radial"). When an aircraft is given its initial vector diverting it from a previously assigned route, the pilot must be informed about the reason for the deviation (e.g. due to traffic, for sequencing, etc.).
General restrictions:
- Aircraft must not be vectored closer than a **half of the [separation minimum](https://www.skybrary.aero/articles/separation-standards "Separation Standards") (i.e. closer than 2.5 NM if the separation minimum is 5 NM) or 2.5NM, whichever is higher,** from the limit of the airspace which the controller is responsible for, unless otherwise specified in local arrangements.
- Controlled flights are not to be vectored into uncontrolled airspace, except in the case of emergency or in order to circumnavigate adverse weather (in which case the pilot should be informed), or at the specific request of the pilot.
- When vectoring or giving a direct route to an IFR flight takes the aircraft off an ATS route, the clearance should take into account the prescribed obstacle clearance.
After vectoring, the controller must instruct the pilot to resume own navigation, giving them the aircraft’s position if necessary.
#### Typical uses
- **Flight [Identification](https://www.skybrary.aero/articles/radar-identification "Radar Identification")** - while not common in e.g. European airspace, this is one of the few methods for identification available when only [primary radar](https://www.skybrary.aero/articles/primary-surveillance-radar-psr "Primary Surveillance Radar (PSR)") is used.
- **Navigation assistance** - if due to equipment malfunction other navigation means (e.g. [GNSS](https://www.skybrary.aero/articles/global-navigation-satellite-system-gnss "Global Navigation Satellite System (GNSS)"), INS, RNAV) are not available vectoring remains an option. This can also be useful for strayed VFR flights if the pilot has lost orientation.
- **[Special use area (SUA)](https://www.skybrary.aero/articles/special-use-airspace-sua "Special Use Airspace (SUA)") bypassing** - if for whatever reason a flight is approaching a SUA (prohibited, restricted, danger, temporary segregated, etc.) and flying above or below it is not feasible then vectoring may be used to guide the aircraft around it.
- **Conflict solving (opposite)** - if a level change is not possible for some reason (e.g. aircraft unable to climb, conflicting traffic at other levels, need for coordination with other sector, etc.) vectoring can be a very efficient way to solve the situation. A relatively small change of heading is often enough to achieve the desired separation.
- **Conflict solving (crossing)** - vectoring is a very effective method for solving crossing conflicts if a level change is not preferable and there is not enough time to perform speed control. In most cases, the aircraft that comes second to the intersection point of the two tracks is instructed to turn in the direction of the first one ("aiming for the other traffic"). This manoeuvre effectively puts the second (or slower) aircraft well beind the first (faster) one. After the crossing is complete, the vectored aircraft may be resumed to point that would compensate for the deviation and the extended flight path, thus gaining both safety and efficiency.
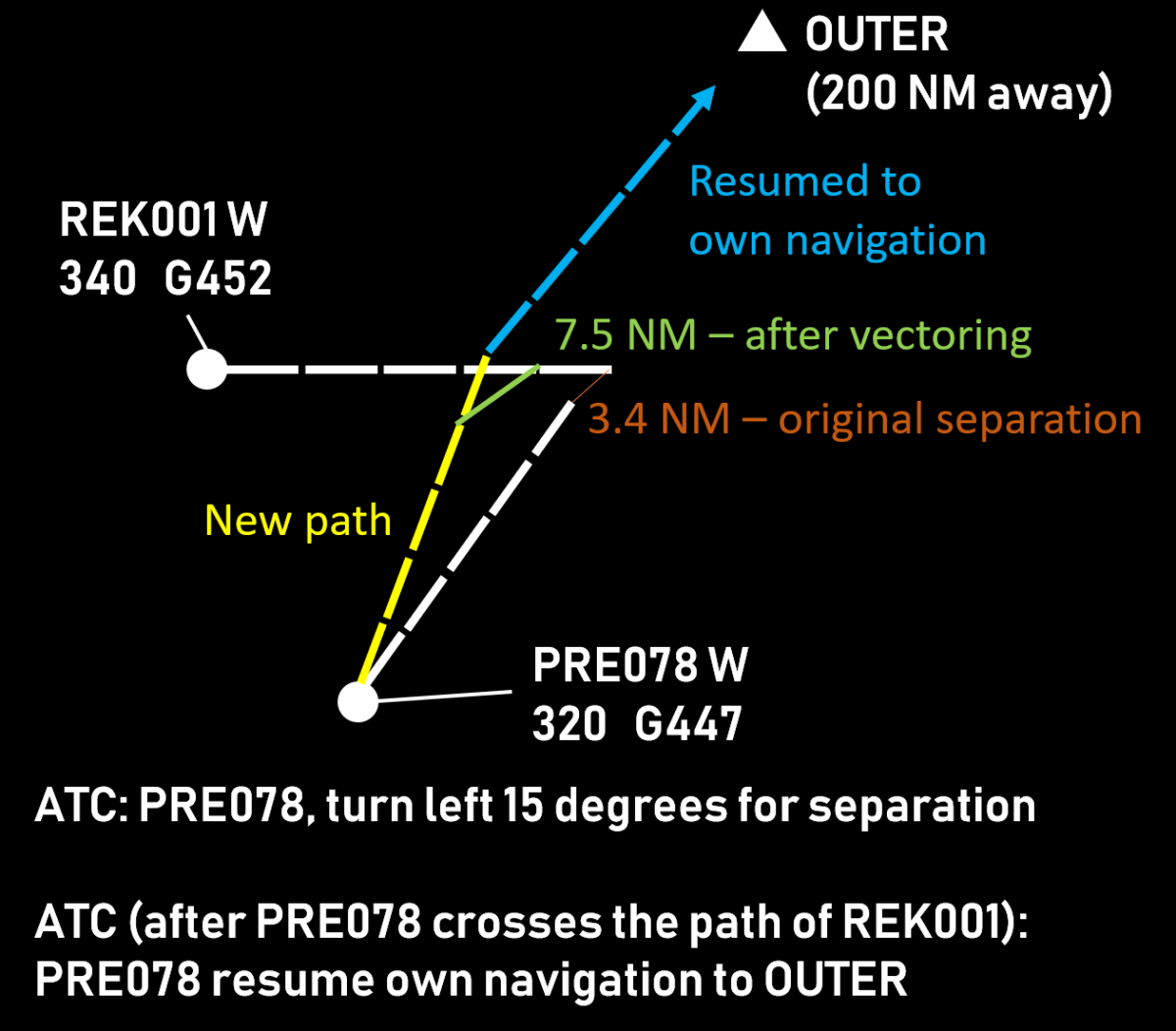
- **Sequencing** - often combined with speed control, vectoring is an effective method to achieve the desired distance before reaching the boundary with the next ATS sector or unit. The application is similar to the crossing scenario, the difference being that after the desired separation is achieved the aircraft being vectored remains behind the one that is ahead.
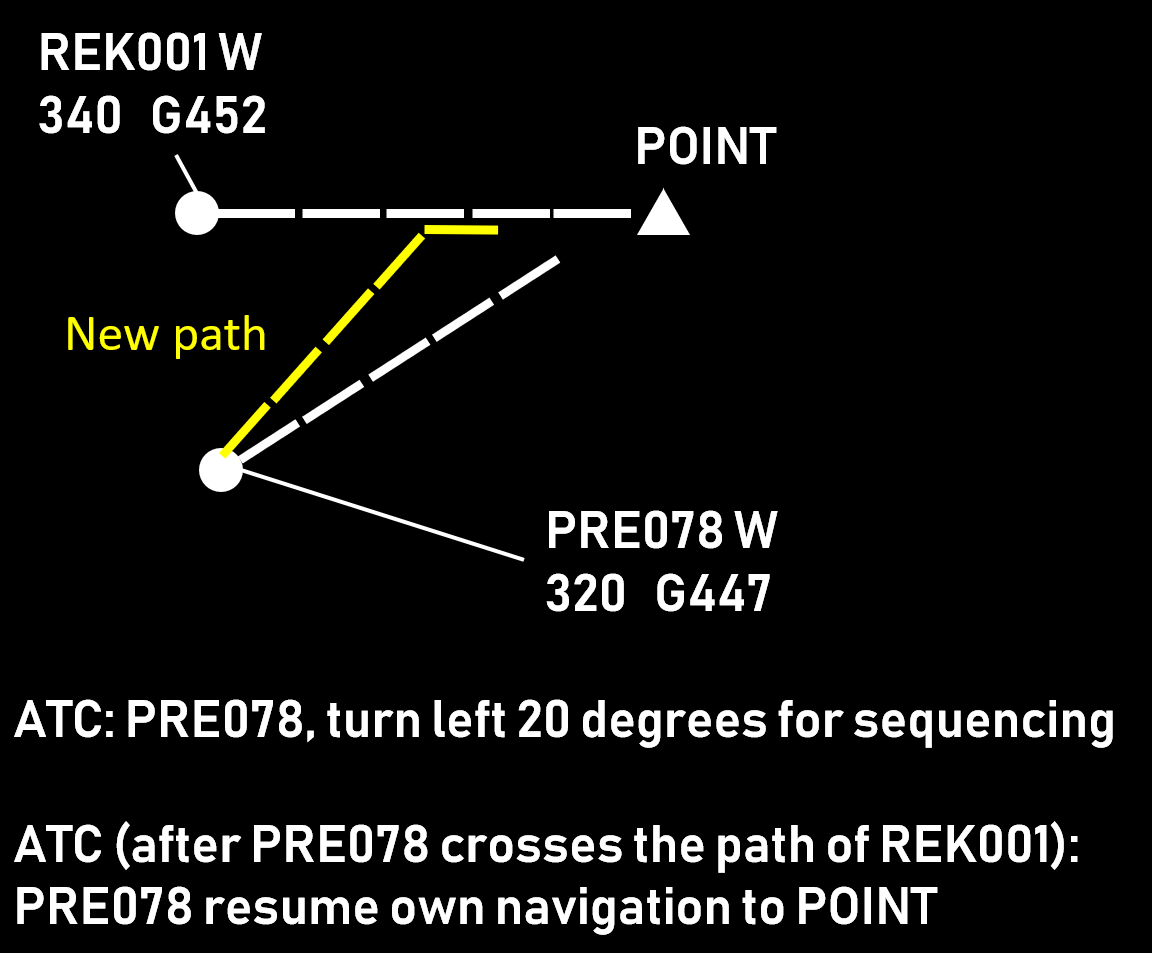
#### Choosing the aircraft
When vectoring is chosen as a means to solve a conflict, the first task of the controller is to decide which aircraft will have to change its heading. Generally, there are three situations:
- Vector both aircraft. This is mostly used to solve conflicts of aircraft on reciprocal (opposite) tracks. This method increases the controller workload (due to having more communication exchanges on the frequency) but offers the benefit of less impact on each aircraft trajectory. Consequently, the increase of the distance flown is usually negligible. While turn direction is determined based on other factors (see next section), the general idea that both aircraft turn, and in the same direction, remains.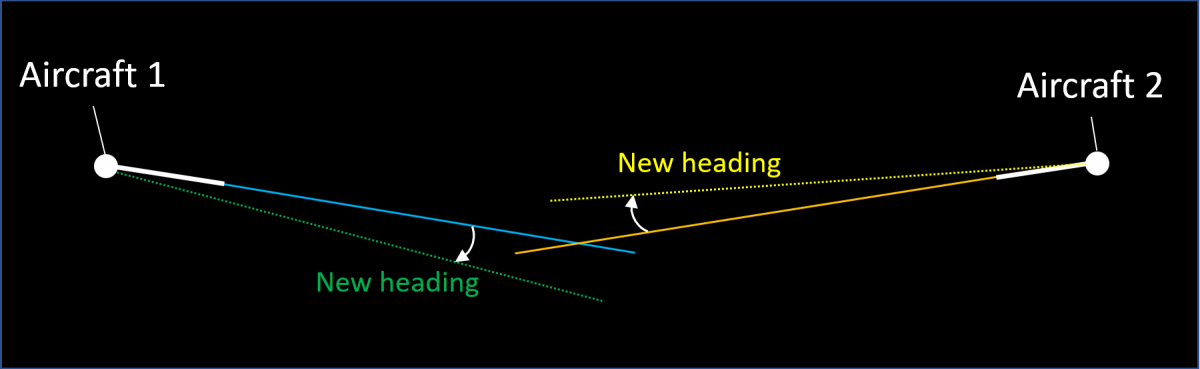
- Vector the aircraft that is behind. This is usually used when the two aircraft are maintaining altitude and one is considered to be overtaking the other. This is the more convenient choice from ATC perspective as well, since it requires less intervention (there is already some separation).
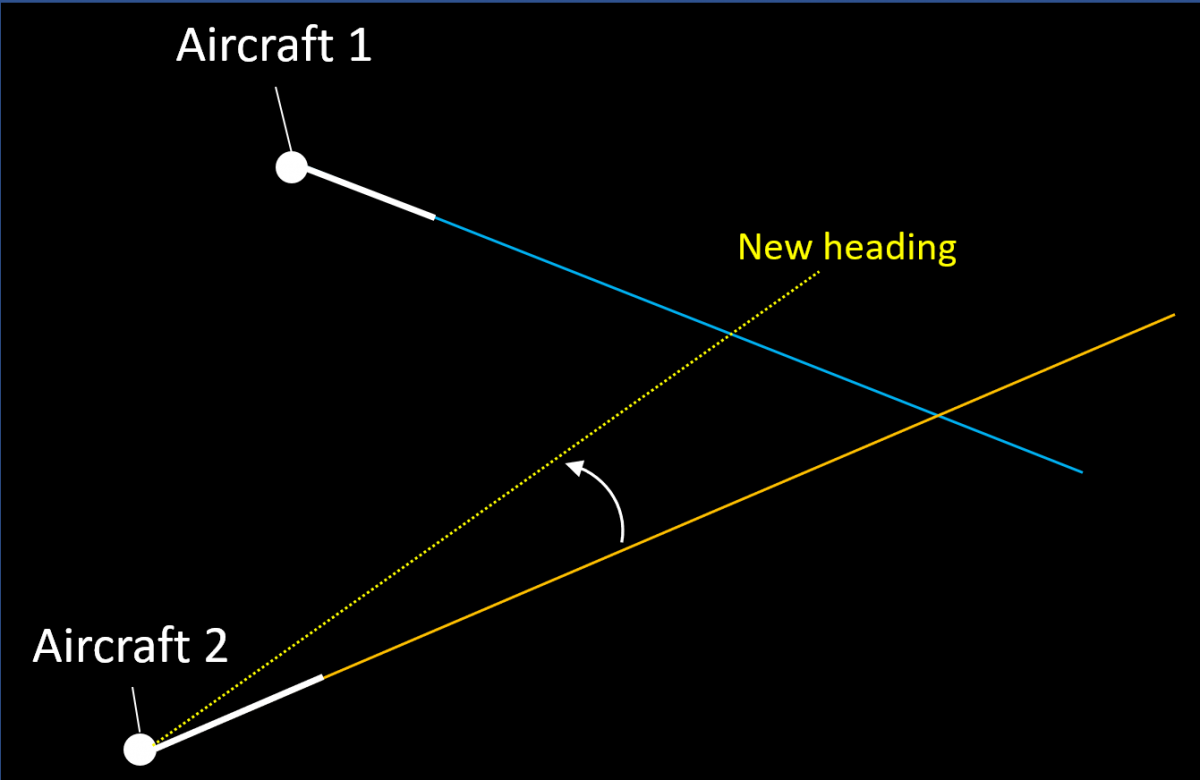
- Vector the requesting aircraft. If a pilot makes a request (usually to climb) and accommodating this request would result in insufficient separation with another aircraft, then the general choice is to vector the requester. Sometimes two vectors are used in such situations - the first one to achieve the desired separation and a second one to maintain it by flying on a parallel track.
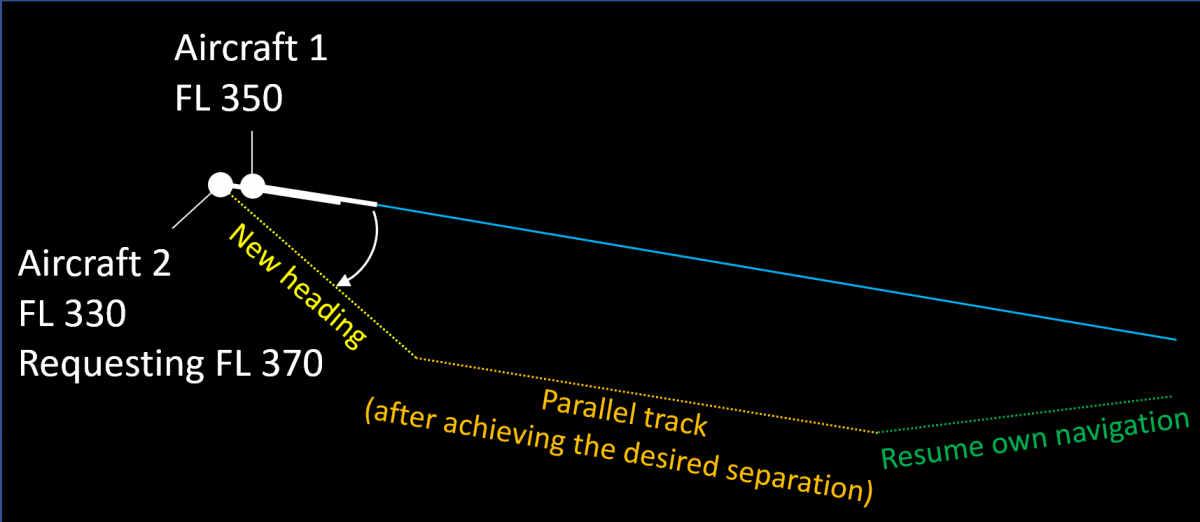
#### Turn Direction
After the aircraft to be vectored has been chosen, the controller decides the direction of the turn. The following general principles are used:
- Aircraft flying on opposite tracks are turned in a direction that would increase the separation.
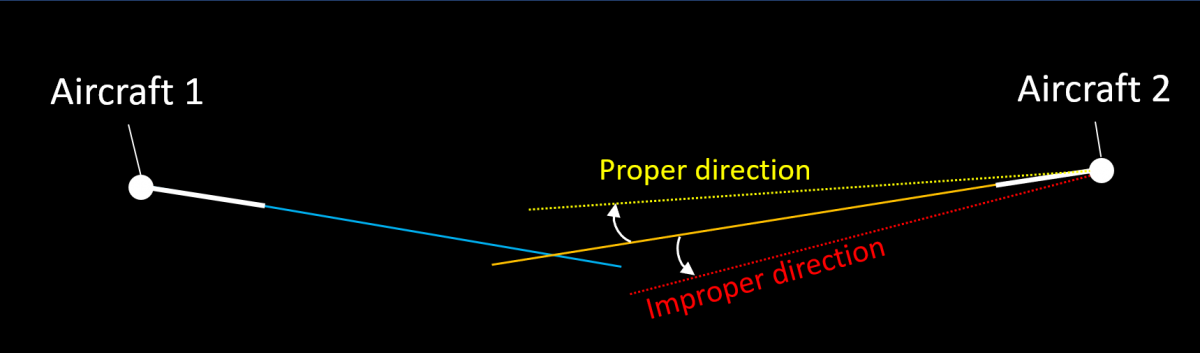
Turning Aircraft 2 slightly to the right is enough to solve the conflict while turning it to the left, even by more degrees, does not.
- "Aiming" at the first aircraft's current position. The crossing point is moved in such a way that the distance from the first aircraft is reduced significantly while the distance from the second one is reduced marginally. This results in the second aircraft passing further behind.
[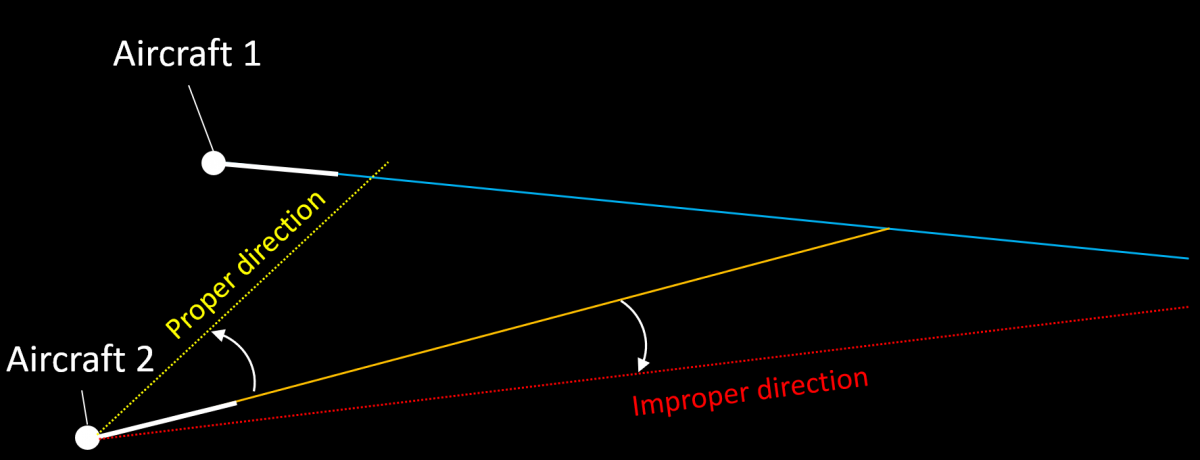](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/vectoring-geometry-07.png)
Turning Aircraft 2 to the left solves the conflict by placing it behing Aircraft 1. A vector to the right, while prolonging the time to the conflict, does not solve it.
- Turning an aircraft against the wind. This reduces the ground speed, effectively placing the aircraft being vectored further behind. In some situations, if the wind is strong enough, vectoring against the wind can be much more effective than speed control for sequencing purposes.
[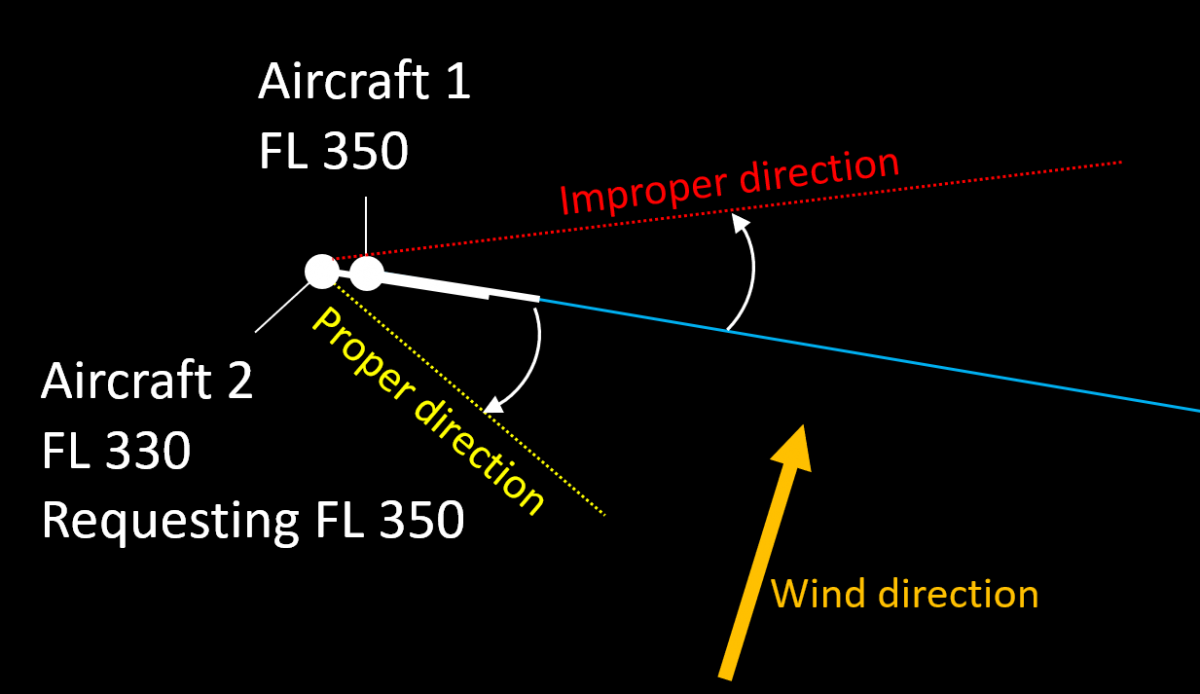](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/vectoring-geometry-08.png)
Turning Aircraft 2 to the right allows it to safely climb to FL 350. Due to the speed reduction caused by the wind Aircraft 2 can be sequenced behind Aircraft 1.
- Turning in a direction that is in line with the flight planned trajectory is preferable. Thus when the aircraft resumes own navigation its overall flight distance will be only marginally increased and may even be reduced (compared to the flight planned).
[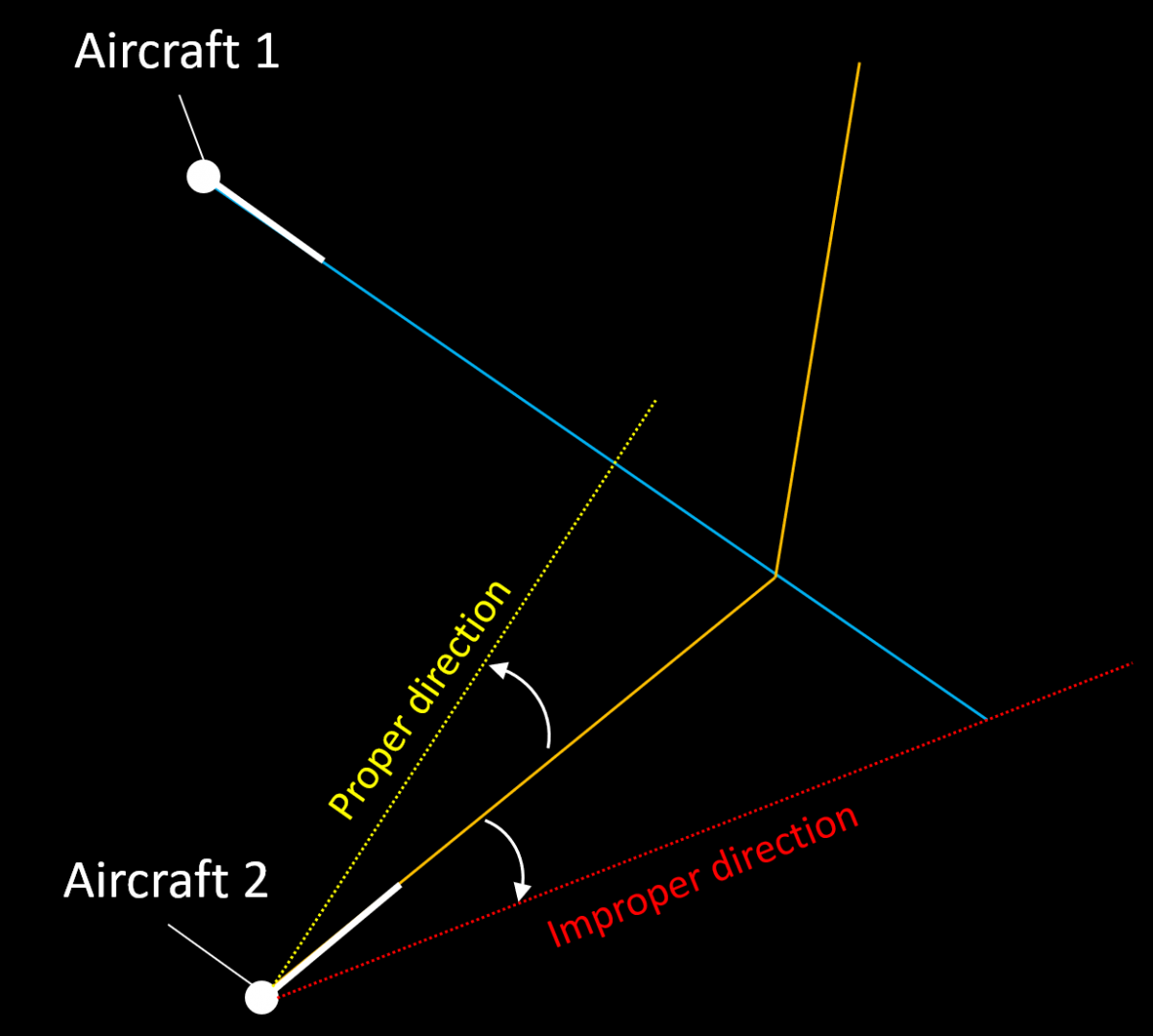](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/vectoring-geometry-09.png)
Vectoring Aircraft 2 in any direction would solve the conflict but the left turn would not cause a delay.
- Turning away from other traffic, special use areas and sector boundaries when practicable. Otherwise additional controller actions may be necessary (e.g. coordination, solving other conflicts, etc.).
#### Associated Risks
- Forgetting that an aircraft is being vectored. This has a negative impact on flight efficiency but may also "surprise" the next ATS sector or unit, especially if the airway makes a sharp turn at the transfer of control point and the aircraft does not.
- Miscalculation of wind impact (level flight). If a controller tries to sequence an aircraft after another one by vectoring but instructs it to turn so that the tailwind component increses, then the manoeuvre may have no effect (the tailwind will increase the aircraft's speed effectively reducing the expected benefit from vectoring).
- Miscalculation of wind impact (climbing and descending aircraft). Wind may be different at different levels. Even if the direction is somewhat the same, the windspeed can vary significantly. Consequently the headwind/tailwind/crosswind component will also vary and this may impact the desired result. For example, the drifting angle at different levels may be different if the windspeed (and therefore the crosswind component) increases with height. This may lead to parralel tracks becoming converging. A common mitigation for this is to assign a parallel or slightly diverging heading to the aircraft being vectored.
- Miscalculation of aircraft performance (climbing and descending aircraft). Generally, climbing aircraft increase their groundspeed and descending aircraft reduce it. The speed at cruising level can be twice that at e.g. FL 150. If this is not taken into account properly, the result may be loss of separation.
#### Things to consider
- **Crossing point.** In most cases vectoring is used to solve crossing conflicts. It is usually most efficient to turn the aircraft that would reach the crossing point later and in the direction of the other aircraft, i.e. if the conflicting traffic is to the left, then the turn should also be to the left. The manoeuvre effectively places the aircraft being vectored behind the other one. If for some reason the first aircraft needs to be vectored, this would require a much larger deviation.
- **[Closest Point of Approach (CPA)](https://www.skybrary.aero/index.php/Closest_Point_of_Approach_(CPA) "Closest Point of Approach (CPA)").** This is the moment when the distance between the two aircraft reaches its minimum. It should be noted that in general, the separation between aircraft continues to reduce for some time even after the first aircraft to reach the crossing point has crossed the track of the second one. The difference between the separation when the first aircraft reaches the crossing point and the moment of CPA depends on the conflict geometry. For example, if the tracks cross at right angle and both aircraft fly at the same ground speed then the separation at the CPA will be about 70% of the separation at the crossing point.
[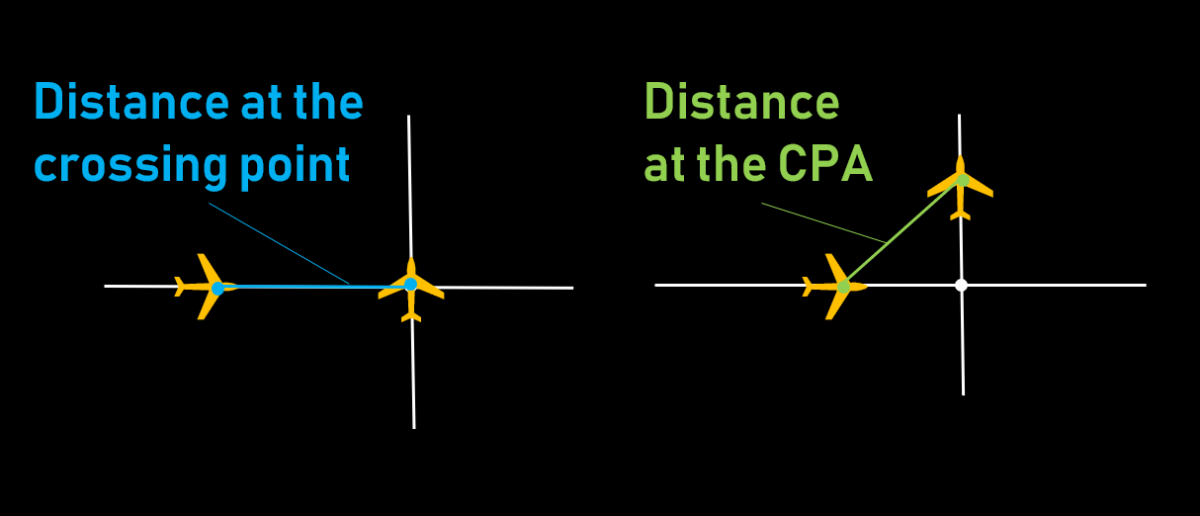](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/vectoring-5.png)
- **The sooner, the better.** An instruction given well in advance will have (almost) no impact on flight efficiency while solving the situation safely. For example, even a 5 degree heading change would result in about 6 miles displacement to the left/right after 10 minutes. On the other hand, if the conflict is happening after 3-4 minutes, the deviation may need to be 20 degrees or even more in some situations.
- **Wind direction and speed.** Generally, it is advisable to take advantage of the wind e.g. by turning the second aircraft into the wind to reduce its speed. This may reduce the necessary time an aircraft has to fly on a heading and generally help in resolving the situation faster.
- **Aircraft speeds.** Vectoring the faster aircraft would result in more spacing after the same amount of time.
- **Limitations**, e.g. during weather avoidance vectoring may not be a feasible method for conflict solving.
- Track crossing angle. An acute crossing angle means a larger deviation would be necessary to reach the desired separation (compared to a right angle). Generally, the bigger the angle of crossing, the smaller the necessary vector (0 degrees meaning the same direction and 180 - opposite).
- **Turn direction.** If the instruction *"turn left/right heading \[ABC\]"* is used **and** the present heading is unknown then the manoeuvre performed may surprise the controller (e.g. if the heading is 360 then "Turn left heading 005" would result in the aircraft making an orbit instead of a small turn to the left).
- **Misunderstanding.** Sometimes it is possible for the flightcrew to confuse instructions like "Turn left 10 degrees" and "Turn left heading 010".
Source: [www.skybrary.aero](https://www.skybrary.aero)
# Speed Control
This article describes the use of speed control by air traffic controllers to manage the traffic flow and solve conflicts. It is focused on the en-route phase and describes the general provisions, typical uses and also gives some advice about the practical use of the method. Note that the advice is derived mostly from good practices and experience, and is in no way intended to replace or supersede local procedures and instructions.
#### Description
Speed control is used to facilitate a safe and orderly flow of traffic. This is achieved by instructions to adjust speed in a specified manner.
Speed adjustments should be limited to those necessary to establish and/or maintain a desired separation minimum or spacing. Instructions involving frequent changes of speed, including alternate speed increases and decreases, should be avoided. Aircraft should be advised when a speed control restriction is no longer required. The flight crew should inform ATC if unable to comply with a speed instruction.
The future position of an aircraft (and, consequently, separation) is determined by the ground speed. Since it is impractical to use it directly, the [indicated airspeed (IAS)](https://www.skybrary.aero/articles/indicated-airspeed-ias "Indicated Airspeed (IAS)") and Mach number are used instead to achieve the desired ground speed. At levels at or above FL 250, speed adjustments should be expressed in multiples of 0.01 Mach. At levels below FL 250, speed adjustments should be expressed in multiples of 10 kt based on IAS. It is the controller's task to calculate the necessary IAS or Mach number that would result in the appropriate ground speed. The following factors need to be taken into account:
- Aircraft type (range of appropriate speeds)
- Wind speed and direction (in case the two aircraft are not on the same flight path)
- Phase of flight (climb, cruise, descent)
- Aircraft level (especially if the two aircraft are at different levels)
Restrictions on the use of speed control:
- Speed control is not to be applied to aircraft in a [holding pattern](https://www.skybrary.aero/articles/holding-pattern "Holding Pattern").
- Speed control should not be applied to aircraft after passing 4 NM from the threshold on final approach.
#### Phraseology
- **Report indicated airspeed / report mach number / speed** (in case the current speed cannot be obtained by other means, e.g. Mode S information)
- **Maintain/increase/reduce** \[**speed**\] \[**or greater/or less**\] \[reason\] \[condition\]. Examples:
- Maintain 300 knots or greater
- Maintain Mach .83 or less due converging traffic until \[point name\]
- Reduce speed 260 knots or less for sequencing
- Increase speed Mach .82 or greater for the next 10 minutes.
- **Resume normal speed** (cancels a previously imposed speed restriction)
- **No \*ATC\* speed restrictions** (cancels a previously imposed speed restriction)
- **On conversion** \[**speed**\]. This instruction is sometimes used for climbing or descending aircraft when the speed control includes the moment of swithcing between IAS and Mach number. ***Note:** while this instruction is used in a number of countries, it is **not** part of the ICAO standard phraseology.*
#### Typical Uses
- Separation adjustment (e.g. two successive aircraft are separated by 9 NM and the required separation over the FIR exit point is 10 NM)
- Separation preservation (e.g. two successive aircraft have the necessary separation but this may change if one of them or both change their speed)
- Delay absorption (an alternative to flying a holding pattern)
- Avoid or reduce vectoring:
- in some situations speed control may be used instead of vectoring
- in some situations speed control may be used in combination with a [vectoring](https://www.skybrary.aero/articles/basic-controller-techniques-vectoring "Basic Controller Techniques: Vectoring") instruction, in order to reduce the time an aircraft flies on heading and/or the heading change.
#### Rules of Thumb
- Generally, 0.01 M equals 6 kt
- Speed difference of 6 kt gives 1 NM in 10 minutes
- Speed difference of 30 kt gives 1 NM per 2 minutes
- Speed difference of 60 kt gives 1 NM per minute
#### Benefits
- Speed control is often the most efficient way for solving conflicts and traffic sequencing.
- The added [workload](https://www.skybrary.aero/articles/controller-workload "Controller Workload") is relatively low, especially for thinner sectors where most level changes need to be coordinated with the neighbouring upper/lower sector.
#### Things to Consider
- Transition times should be taken into account. It usually takes a few minutes before the aircraft reaches the desired speed due to inertia.
- When an aircraft is heavily loaded and at a high level, its ability to change speed may be very limited.
- Aircraft experiencing turbulence often fly at reduced speed. Under such circumstances it is advisable to coordinate instructions for speed increase with the flight crew.
- Speed control needs more time to achieve the necessary separation compared to other methods (vectoring, level change, vertical speed control). For shorther ATS sectors (e.g. 10 minutes transit time) this method is effective for:
- Separation adjustment (e.g. if the aircraft already have some separation and need a few NM more, this could be achieved by speed control even in shorter ATS sectors)
- Preservation of achieved separation (e.g. if two successive aircraft of similar type already have the nevessary separation, an instruction to maintain the same speed would be appropriate)
- Impact of wind. Winds can make a slower aircraft (in terms of M or IAS) have higher groundspeed than a faster one. In a complex situation, it is usually better to use speed control for successive aircraft and other method (e.g. level change) for a converging conflict.
[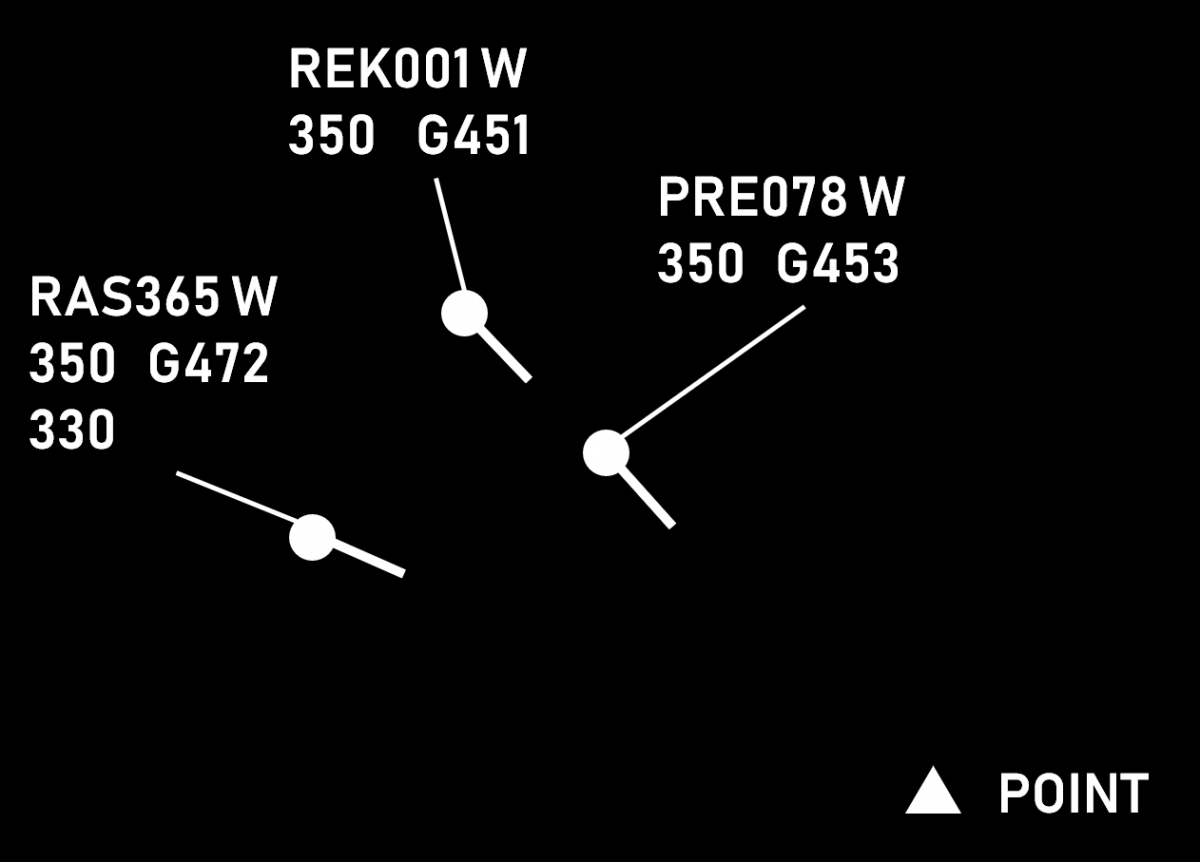](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/speed-control-1.png)
In this situation the three aircraft are of the same type and flying with the same Mach number. However, due to the strong winds, RAS365 is considerably faster. It is therefore advisable to use speed control for PRE078 (e.g. M078 or greater) and REK001 (e.g. M078 or less) and change the level of RAS365 (in this case, descend to FL330).
- Maintaining the Mach number during climb (in unchanged wind) results in reduction of TAS (and therefore groundspeed). It is therefore possible that a succeeding aircraft catches up with the preceeding one even if the preceeding aircraft is assigned a higher speed.
- Maintaining IAS during descent (in unchanged wind) results in reduction of TAS (and therefore groundspeed). It is therefore possible that a succeeding aircraft catches up with the preceeding one even if the preceeding aircraft is assigned a higher speed.
- An instruction for speed reduction is generally incompatible with one for maintaining a high rate of descent. Such combinations are best avoided and should only be used after explicit coordination with the flight crew that the desired combination of lateral and vertical speeds is achievable.
- Speed reductions to less than 250 kt IAS for turbojet aircraft should be applied only after coordination with the flight crew.
Source: [www.skybrary.aero](https://www.skybrary.aero)
# Vertical Speed
This article describes the use of vertical speed (rates of climb and descend) by air traffic controllers to control the traffic flow and solve conflicts. It describes the general procedures, typical applications and associated risks. It also gives some advice on the use of this method by air traffic controllers. Note that any part of this article is not intended to act as or replace any existing local procedures.
#### Description
In order to facilitate a safe and orderly flow of traffic, aircraft may be instructed to adjust rate of climb or rate of descent. Vertical speed adjustments should be limited to those necessary to establish and/or maintain a desired separation minimum. Instructions involving frequent changes of climb/descent rates should be avoided.
Climbing/descending aircraft may be instructed to maintain a specified rate of climb/descend, a rate of climb/descent equal to or greater than a specified value or a rate of climb/descent equal to or less than a specified value.
An aircraft may be instructed to expedite climb or descent as appropriate to or through a specified level, or may be instructed to reduce its rate of climb or rate of descent.
Aircraft must be advised when a rate of climb/descent restriction is no longer required. The flight crew must inform the ATC unit concerned if unable, at any time, to comply with a specified rate of climb or descent.
#### Phraseology
The vertical speed clearance may be a part of a vertical clearance or a separate one. It specifies the required rate of climb/descent, usually in feet per minute and may also contain:
- upper or lower limit of the vertical speed, if applicable. The phrases *"or greater"* and *"or less"* are used in this case. If no limit is specified, then the aircraft is expected to maintain an exact vertical speed.
- a condition, if applicable (e.g. until passing a level or a point)
- further information (e.g. reason for the restriction, e.g. traffic, special use area, etc.)
> PRE078 climb FL 370 at 1000 feet per minute or greater until passing FL 360 due crossing traffic.
#### Typical Uses
| Accomodation of climb requests
| [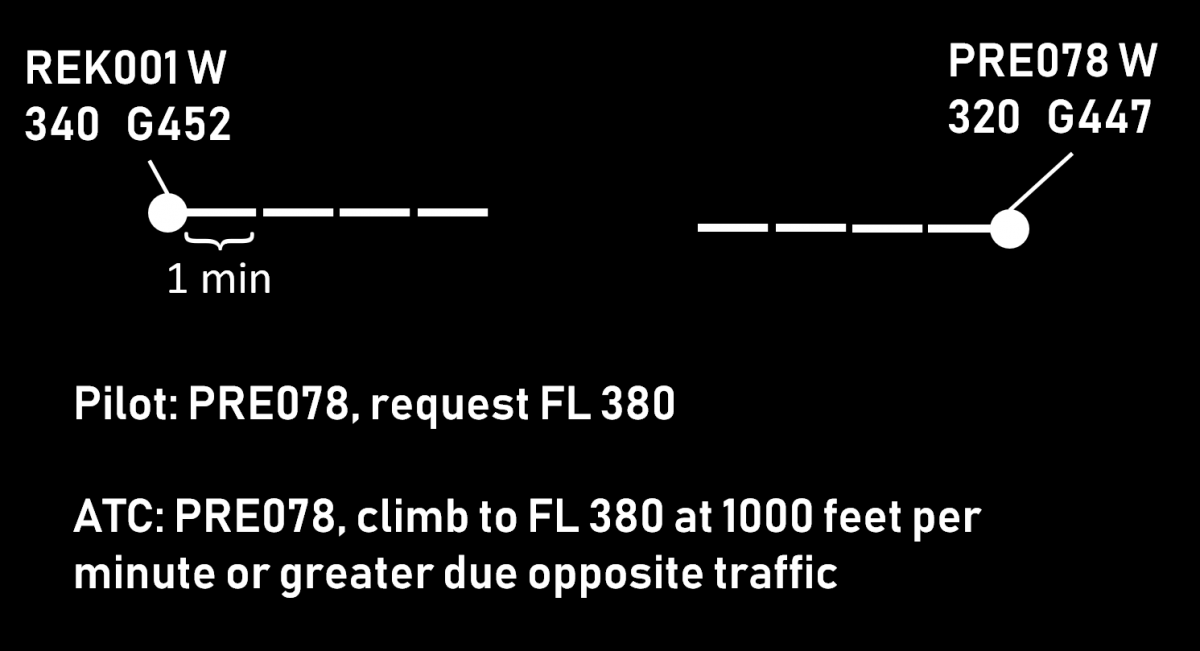](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/rates-1.png) |
| Separation of departing and arriving traffic
| [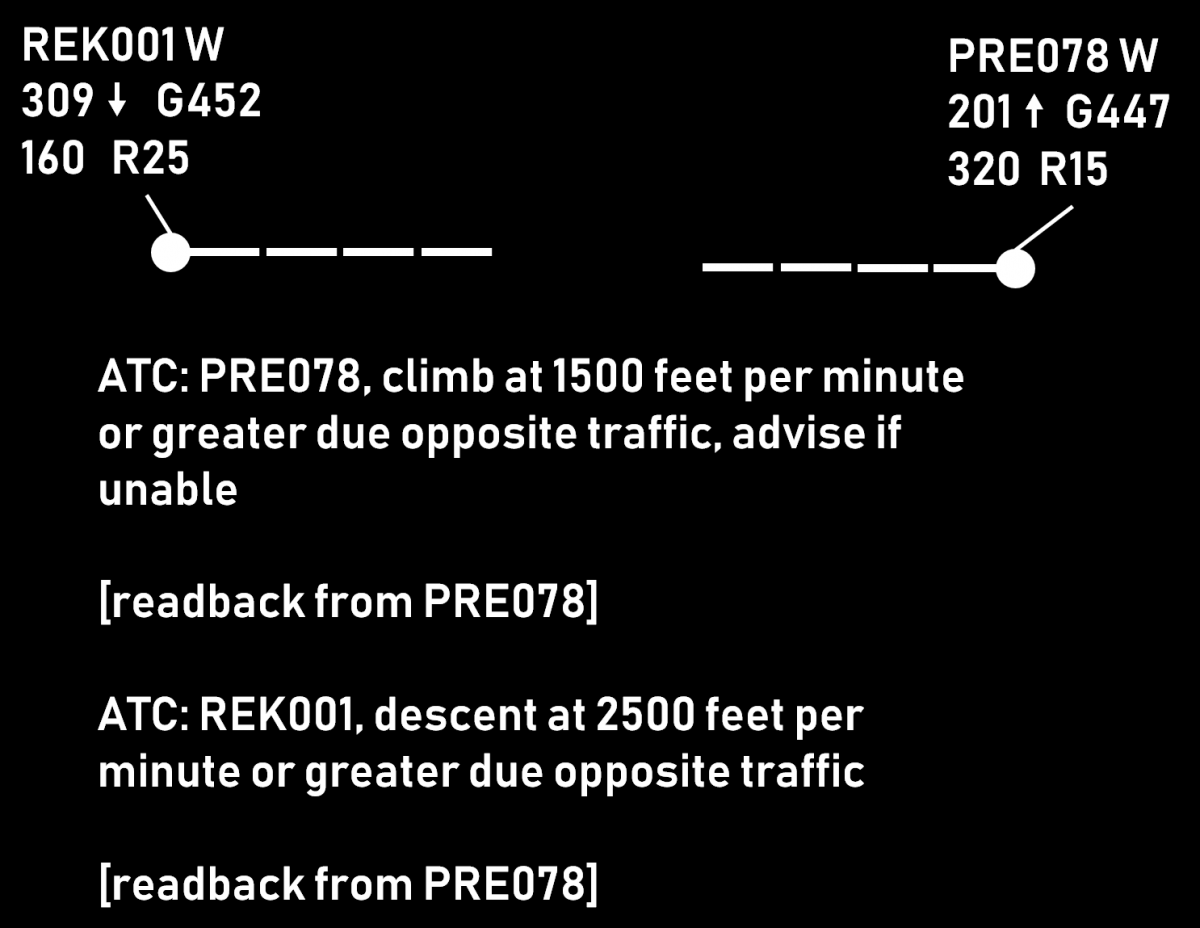](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/rates-2.png) |
| Descending arriving aircraft below the overflying traffic | [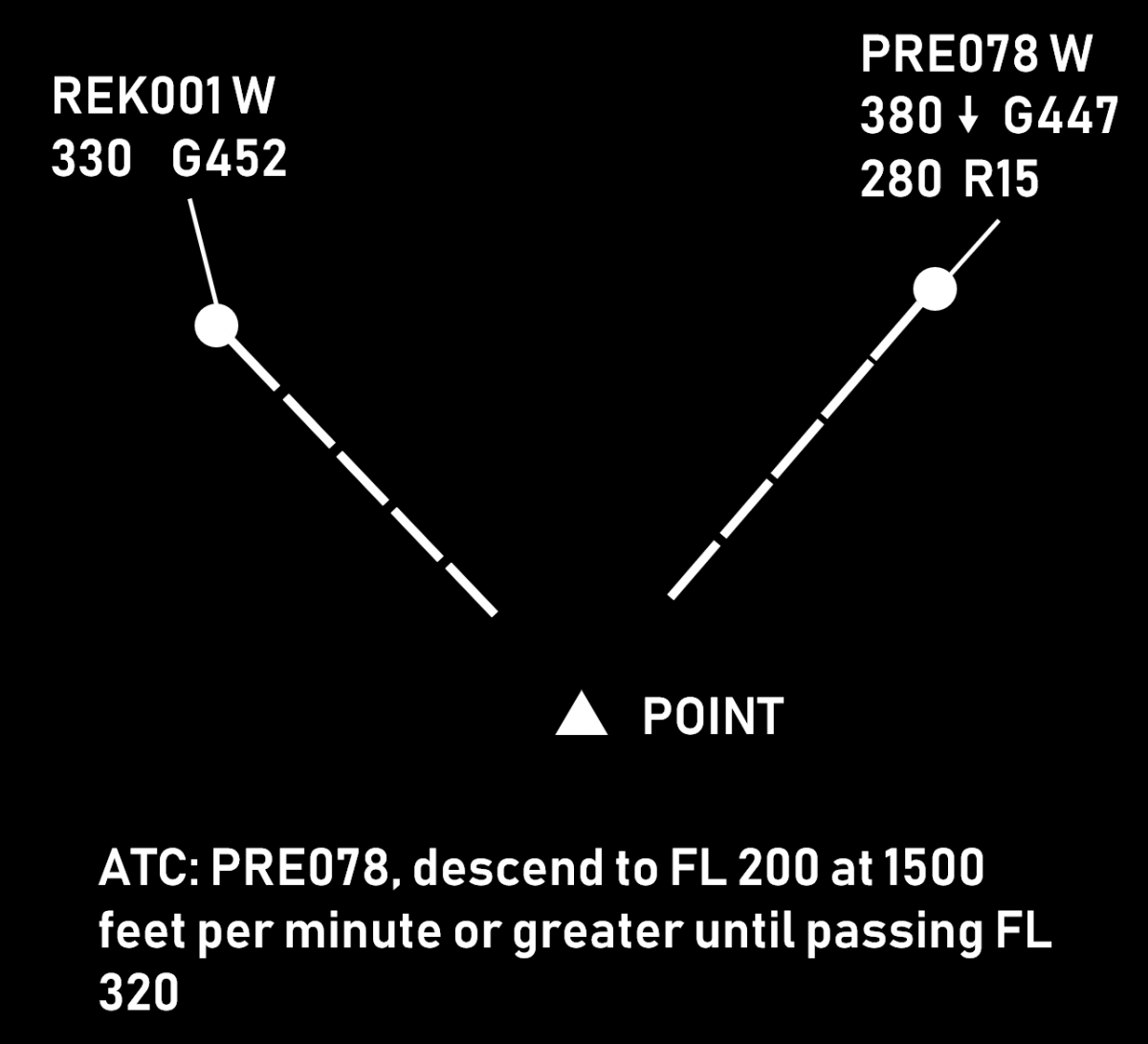](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/rates-3.png) |
| Vertical sequencing, i.e. establishing and maintaining vertical separation between two (or more) climbing or two (or more) descending aircraft | [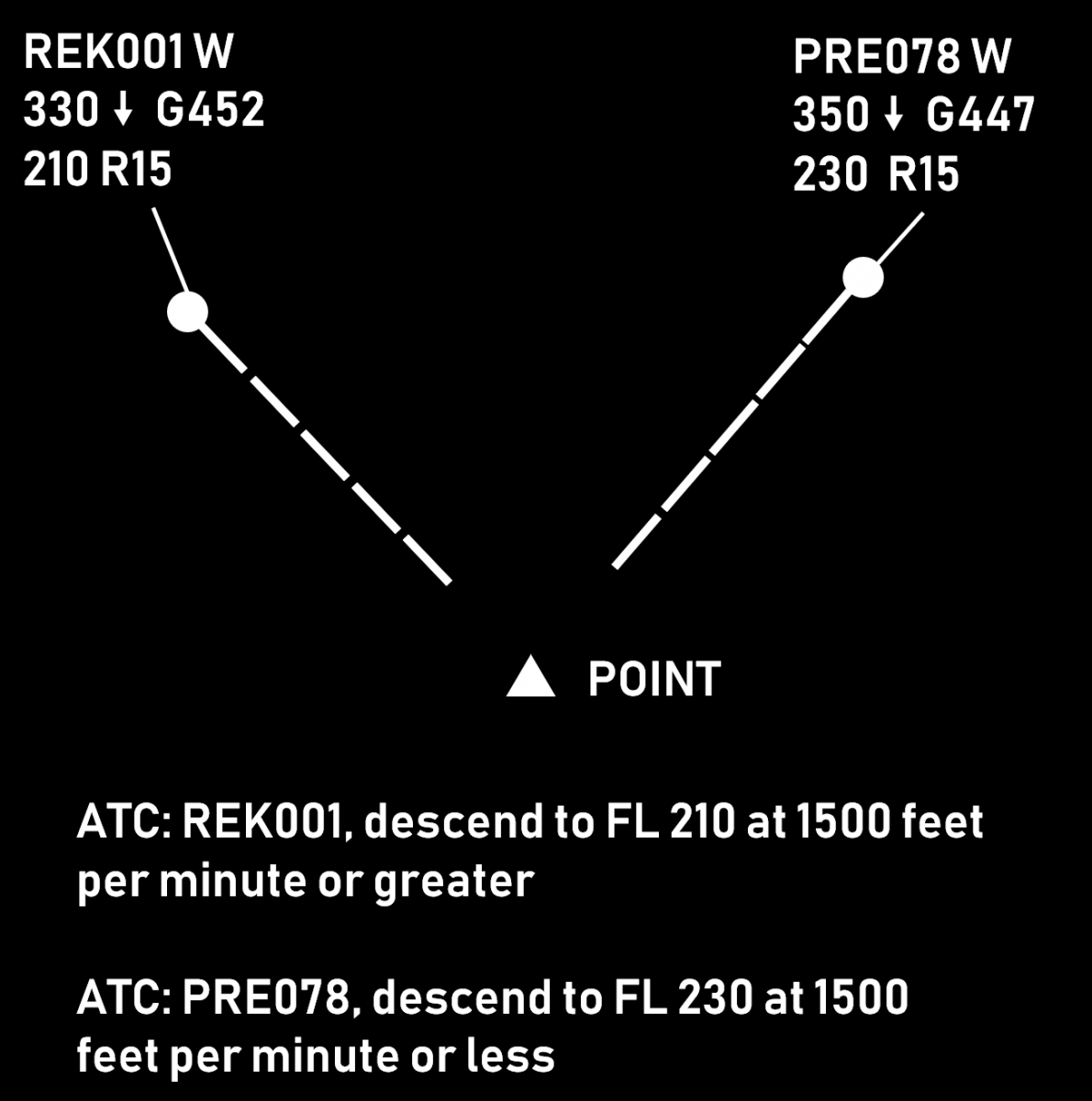](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/rates-4.png) |
| Corrective action (e.g. when the unrestricted vertical speed is considered insufficient) | [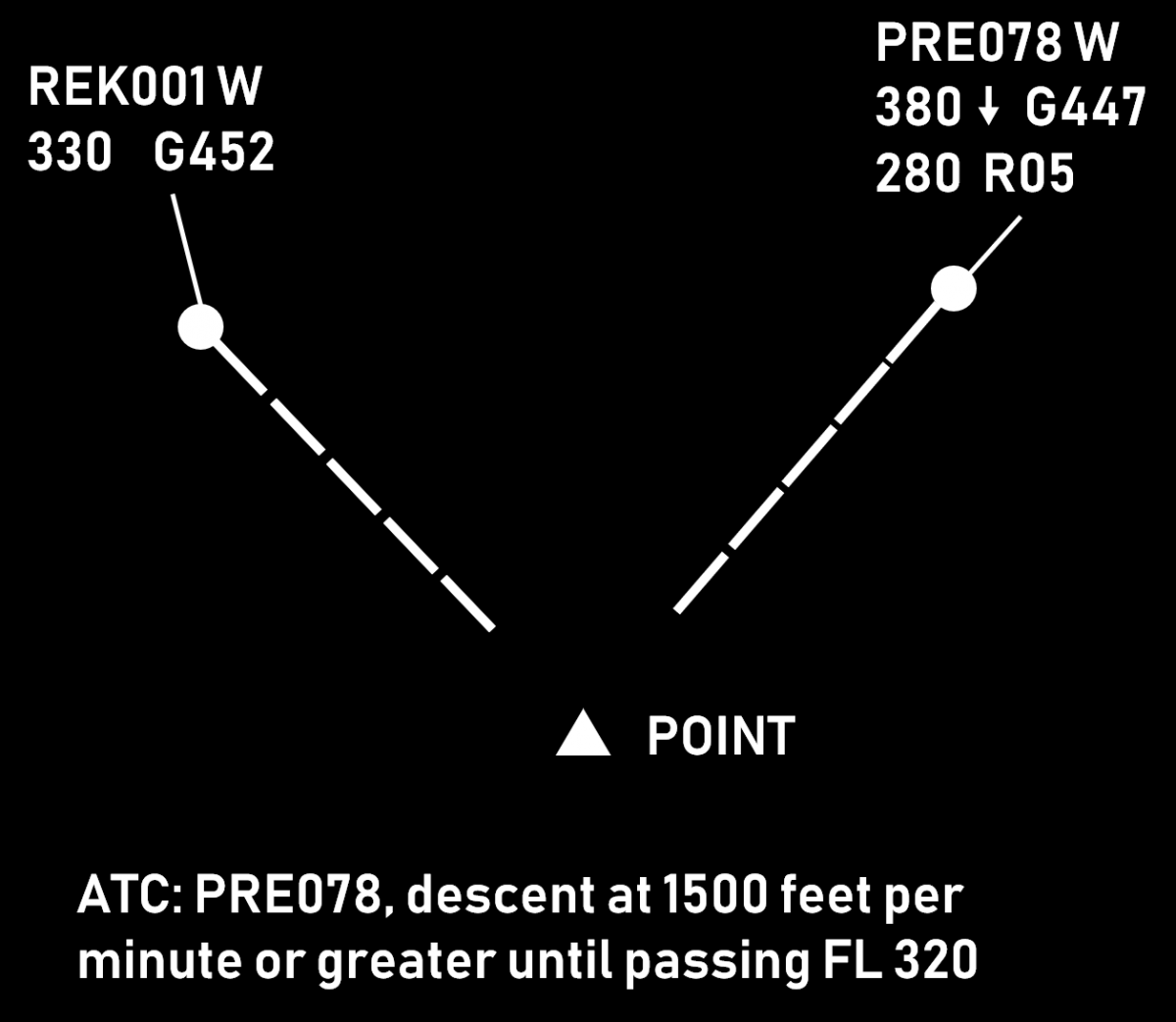](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/rates-5.png) |
#### Benefits
When properly used, vertical speed control helps to achieve
- [continuous climb](https://www.skybrary.aero/articles/continuous-climb-operations-cco "Continuous Climb Operations (CCO)")/[descend](https://www.skybrary.aero/articles/continuous-descent "Continuous Descent") (fewer level offs), therefore better efficiency
- descents starting close to the top-of-descent
- timely accommodation of climb (mostly) and (sometimes) descent requests
- reduced [workload](https://www.skybrary.aero/articles/controller-workload "Controller Workload") due to reduced need for vectoring. A proper vertical speed ensures that horizontal separation will be preserved at least until vertical separation is achieved.
#### Associated Risks
- The margin for error is often reduced. This method relies mostly on maintaining vertical separation, which is much smaller than the horizontal one (e.g. 1000 ft as opposed to 5 NM). Therefore, any misunderstanding or non-compliance can easily result in [loss of separation](https://www.skybrary.aero/articles/loss-separation "Loss of Separation").
- Harder to monitor aircraft compliance (as opposed to e.g. vectoring). While the information for vertical speed is usually available, it may require some effort to present it. Furthermore, the interpretation of two (or more) numbers and the comparison of clearances versus performance takes more time than just having a look at the situational display (which is used to monitor horizontal separation).
- Aircraft may be unable to maintain the assigned rate of climb after certain level. If this happens, flight crew may or may not inform the controller.
- Wrong [readback](https://www.skybrary.aero/articles/read-back-or-hear-back "Read-back or Hear-back") may easily ruin the plan (e.g. both aircraft descending with "or greater")
#### Things to Consider
- Rates of climb should be coordinated with the flight crew, especially:
- when approaching the cruising level
- when the climb is not desired by the flight crew
- when temperatures are high
- Some aircraft types are generally unable to maintain a high rate of climb (e.g. [AIRBUS A-321](https://www.skybrary.aero/index.php/A321 "A321"), [AIRBUS A-340-300](https://www.skybrary.aero/index.php/A343 "A343"))
- In order to mitigate the risks for crossing or opposite traffic situations, a safety buffer of 1 or 2 minutes should be used. This can be done by e.g.
- Issuing the clearance(s) a bit earlier
- Assigning vertical speeds that are a little higher (e.g. 1500 instead of 1000)
- High rates of descent are generally incompatible with low speeds. A combined instruction to reduce speed and increase the RoD should be coordinated with the flight crew.
- The aircraft needs time to achieve higher rates (2000 ft/min or higher). The transition period should be considered when calculating the necessary vertical speed.
- During the final 1000 ft, the vertical speed is usually 1000 ft/min or less. This is done to avoid [level busts](https://www.skybrary.aero/index.php/Level_Bust "Level Bust"). It is therefore impractical to assign a rate of 2000 ft/min or greater if the aircraft is to climb or descend some 2000-3000 ft.
- The phrases **"Expedite climb" and "Expedite descent", while being standard ICAO phraseology do not prescribe specific vertical speeds and should be used with caution.** The general expectation in such case would be that:
- a climbing aircraft would climb at the highest rate possible (which may or may not be enough to achieve the desired result). It is therefore advisable that larger safety buffers are used or an alternative plan is ready for implementation.
- a descending aircraft would increase the rate of descent to at least 2000 ft/min. It is therefore advisable that this method is used for the first few thousand feet (e.g. for an aircraft at FL 390 "Descend FL 290, expedite passing FL 370 due crossing traffic")
- There should always be an alternative plan to accommodate for an aircraft being unable to continue climb with the desired rate.
#### Rules of Thumb
- Vertical speed of 2000 ft/min gives 10 FLs in 5 minutes
- Vertical speed of 2500 ft/min gives 10 FLs in 4 minutes
- Combined vertical speed of 4000 ft/min (e.g. RoD 2500 and RoC 1500) gives 20 FLs in 5 minutes
*Combined vertical speed is the sum of the vertical speeds of a climbing and a descending aircraft, e.g. if aircraft A is climbing at 1500 ft/min and aircraft B is descending at 2000 ft/min, then the combined vertical speed is 3500 ft/min.*
Source: [www.skybrary.aero](https://www.skybrary.aero)
# Level Change
While there are various reasons for a level change, this article focuses on the conflict solving aspect.
#### Description
Changing an aircraft's level is often the easiest way for a controller to solve a conflict, i.e. a situation where two (or more) aircraft are expected to be closer than the prescribed [separation minima](https://www.skybrary.aero/articles/separation-standards "Separation Standards").
Advantages:
- Comparatively smaller intervention. The aircraft continues to fly using own navigation (as opposed to [vectoring](https://www.skybrary.aero/articles/basic-controller-techniques-vectoring "Basic Controller Techniques: Vectoring")) and follows the planned route (as opposed to proceeding direct to some distant waypoint).
- Faster to achieve. Even when the aircraft is to climb or descend by 2000 ft, only 1000 are often enough to ensure separation with the conflicting aircraft (see section Opposite Levels for details). This means that the conflict is usually solved within less than a minute.
- Easier to monitor on a [situation display](https://www.skybrary.aero/articles/situation-display "Situation Display"). Wind can influence both aircraft speed and flight direction. Additionally, speed vectors can change direction due to specifics of the surveillance system (especially the presence or absence of a tracker). On the other hand, all modern ATS systems provide an indication for climb or descend (an arrow next to the aircraft level). This makes it much easier for a controller to monitor aircraft compliance.
- Less [controller workload](https://www.skybrary.aero/articles/controller-workload "Controller Workload"). Changing an aircraft's level normally requires one instruction and about a minute to achieve the required separation. By contrast, [speed control](https://www.skybrary.aero/articles/basic-controller-techniques-speed-control "Basic Controller Techniques: Speed Control") usually requires prolonged monitoring (the required separation "builds up" gradually). Vectoring requires more instructions - at least one for the heading change and one for the return to own navigation but more can be necessary depending on the circumstances. This will also require a longer period of monitoring.
Disadvantages:
- The main disadvantage of a level change is that aircraft normally fly at their optimal cruise levels. Therefore, any level change leads to reduced efficiency. This effect gets worse when increasing the difference between the desired and the cleared level.
- The use of temporary level change (i.e. the aircraft climbs/descends to a safe level to solve a crossing conflict and then returns to its cruising level) requires two vertical movements (one climb and one descend) which is also sub-optimal in terms of efficiency.
- There is an inherent risk of a blind spot, i.e. the controller may solve a medium term (e.g. 15 minutes ahead) conflict while at the same time create a new one with an aircraft just below or above the one being instructed to change level.
- When vertically split sectors are used, the level change may require [coordination](https://www.skybrary.aero/articles/coordination-atc "Coordination in ATC") with an adjacent upper or lower sector which increases the workload for both controllers.
#### Climb Vs. Descent
After deciding to solve a conflict by a level change, the controller must choose between climb and descent. The former is generally preferred, as it leads to better flight efficiency. However, in some situations descent is the better (or the only) option, e.g.:
- The aircraft is unable to climb due to weight. Note that weight reduces as fuel is burnt so a higher level may be acceptable later. In this case the controller should take into account that the climb rate could be less than usual.
- The aircraft is approaching its top-of-descent. Instructing an aircraft to climb shortly before it would request descent is not very beneficial to flight efficiency and can increase controller workload (the higher the aircraft, the more potential for conflicts during the descent).
- Turbulence is reported at the higher level. Vectoring, direct route or speed control are generally preferable in this situation.
- The manoeuvre is to be performed quickly (e.g. due to a [conflict being detected](https://www.skybrary.aero/articles/conflict-detection "Conflict Detection") late). In this case, if a climb instruction is issued, it may be declined by the crew, thus losing precious time.
If the controller is in doubt as of which option is preferable (and if both are available), the controller may first ask the pilot (time and workload permitting). The fact that the range of available speeds is reduced at higher levels should also be considered. If the climb is to be combined with a speed restriction, this should be coordinated with the crew beforehand.
#### Opposite Levels
In many situations a level change would require the aircraft to climb or descend by 2000 feet (so that the new level is appropriate to the direction of the flight). However, sometimes it is better to use an opposite level, i.e. one that is only 1000 feet above/below. This is often a good solution in case of crossing conflicts, i.e. where the paths of the two aircraft only intersect at one point and the level change is expected to be temporary.
- The solution is better in terms of flight efficiency because the aircraft will fly as close as possible to the desired level and the need for vertical movement will be reduced
- The opposite level may happen to be within the own sector, therefore no coordination with an adjacent upper or lower sector would be necessary. This reduces the workload of both controllers and is especially useful when there are multiple, vertically-split sectors.
It should be noted, that a few risks exist with this solution:
- If there is a flight on an opposite track, the normally expected 1000 ft separation would not exist
- In case of radio communication failure, the aircraft may fly at an opposite level much longer than expected and the exact moment of returning to the previous level may not be easy to determine.
The picture below show a situation where the use of opposite level is preferable. The level change will be required for a few minutes only and there is no opposite traffic.
[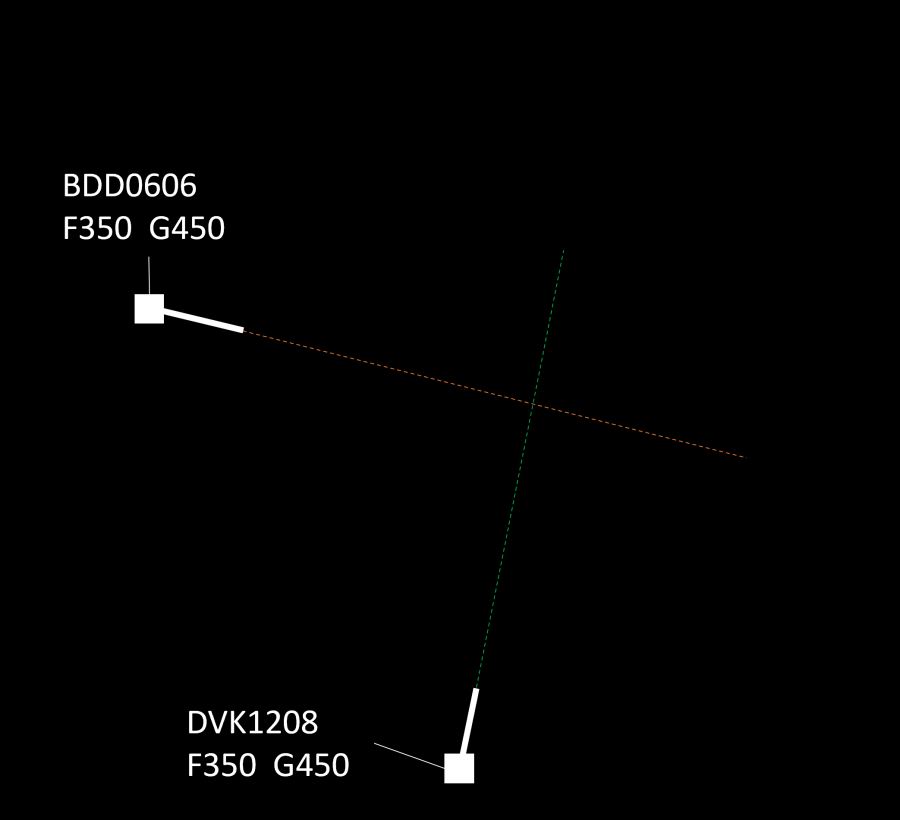](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/levelchange1.png)
The picture below show a situation where the use of opposite level is not feasible because of opposite traffic. Therefore, a level change of 2000 ft is preferable.
[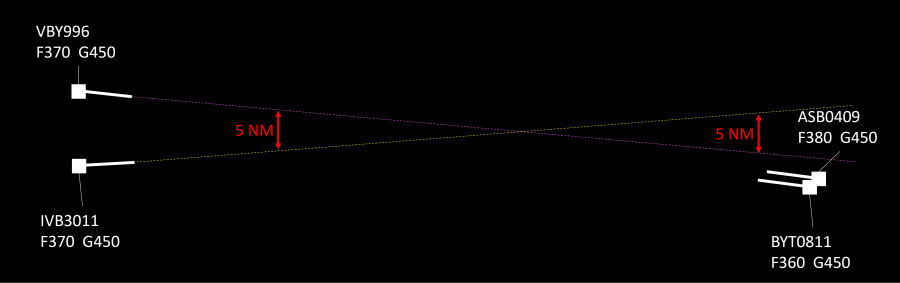](https://knowledgebase.vatsim-germany.org/uploads/images/gallery/2023-04/levelchange2.png)
The use of opposite levels can sometimes be justified when the conflict is at the sector exit point. This solution, however, is subject to approval from the downstream controller. The feasibility of this option depends on the geometry of the conflict (are the aircraft diverging after the point of conflict) and on the traffic situation (are there aircraft that are flying at the same level on an opposite track).
#### Priorities
As a general rule, when two aircraft are at the same cruising level, the preceding aircraft would have priority, i.e. the succeeding aircraft will have to climb or descend. Other criteria may be specified in the manual of operations or other documents containing local procedures. In any case, the controller may deviate from these procedures based on the traffic situation. For example, if changing the level of the succeeding aircraft would create a new conflict (and thus, a new intervention would be necessary), the controller may opt to work with the preceding aircraft. Naturally, flights in distress, or those performing SAR operations, would have priority over other traffic. This includes obtaining (or maintaining) the desired level while a lower priority traffic (e.g. a commercial or general aviation flight) would have to change level. Other priorities may be specified in local procedures (e.g. flights with head of state on board).
#### Vertical Speed Considerations
Normally, vertical speed is not considered an issue in case of a level change solution to a conflict. This is because in most cases the instruction is issued well in advance (5-15 minutes before the potential separation breach) and the level change is 1000 or 2000 ft, which means that vertical separation will be achieved comfortably prior to losing the required horizontal spacing. Nevertheless, there are some situations where it might be necessary to ensure that the vertical speed will be sufficient. These include:
- There is a reason to believe that the aircraft will not (be able to) climb fast, e.g. a heavy long-haul flight in the initial cruise stage, the aircraft type is known to climb slower than others, the new level is near the ceiling, etc. While 1000 ft/min means that 1000 ft separation will be achieved in one minute, if the rate drops to 200 ft/min, the required time will be 5 minutes. In the scenario where 2000 ft level change is necessary (e.g. converging traffic at the sector exit point and an opposite traffic 1000 ft above), a 200-300 ft/min climb rate will result in a 7-10 minute climb.
- Sometimes, if a descent rate is not specified, the manoeuvre may start at rates in the range of 500 ft/min. In this case, a 2000 ft level change will require 4 minutes as opposed to only 1 or 2 if "normal" vertical speeds of 1000-2000 ft/min are used.
In such situations the controller should either:
- ensure the vertical speed will be sufficient (e.g. by specifying a desired rate of climb or descent), or
- issued the instruction early enough, or
- if the above are not possible, an use an alternative solution.
Source: [www.skybrary.aero](https://www.skybrary.aero)
# Runway Change Guide
Runway changes might be tricky, especially during phases with a lot of traffic. This guide should help you to manage this situation. Example of a runway change at Frankfurt/Main EDDF from 07 ops to 25 ops.
#### When is a runway change initiated?
For this, a look at the **METAR** and the **TAF** is useful. Basically, runway 25 is preferred in case of a definite 25-wind (between 160 and 340 degrees) or variable wind (according to the regulations, up to a tailwind component of 5 knots, although it does not depend on one knot). In many cases, 07 is still used with constant weak 07 wind, e.g. 030/5, although the tailwind component on 25 is therefore less than 5 knots. The reason for this are smaller gusts, which are briefly larger than 5 knots, but are not displayed in the METAR).
In case of doubt, a look at FR24 helps, which configuration is operated in real. However, in individual cases, there may be other reasons for a runway change in real (police helicopter mission, failure of navigation equipment, etc.).
#### Who decides, when a runway change is initiated?
The **tower supervisor/coordinator** decides to rotate, but Approach is involved in deciding exactly when to rotate (see below).
#### How does the Runway Change work once the decision has been made?
Tower calls Approach and informs about the upcoming runway change. In addition, the center controllers or, if available, a center supervisor should be informed so that other STARs can be cleared if necessary. Depending on the traffic situation, Approach then decides who will be the **last inbound for 07L and 07R** respectively.
Apart from inbound rushes, it is usually quite simple: those who are already more or less across the field still get 07 in any case, while those who have just flown into the TMA are cleared for 25. Approach can either assign vectors or change the STAR for the pilot, depending on personal preference.
In the inbound rush, however, Approach should try to find a suitable gap where there are not so many inbounds for a few minutes. If the wind is acceptable, the runway change can be postponed a bit if the inbound situation does not improve in the next few minutes. Nevertheless, after 20 minutes at the latest, a decision should be made as to who will be the last inbounds for 07L and 07R.
In the optimum case, these are two aircraft that land at approximately the same time. **The call signs of these two aircraft are then passed on to the tower as well as an approximate landing time**.
> "DLH123 last for 07L, DLH456 last for 07R, both landing in about 15 minutes".
If the tower knows this, it must then be considered **for all outbounds whether they must be cleared for 25, or whether they can still depart from 07**. This consideration is primarily the task of the tower supervisor/coordinator. What must be avoided is that another outbound takes off from 07 even though the first planes are already on the 10-mile final approach of 25. Of course, the pilots should also be given a reason for the reclearance.
> "We are changing runway direction, therefore you will be recleared, are you ready to copy?...".
If, as in the example above, the last aircraft lands on 07 in 15 minutes, the tower can still allow take-offs from 07 for another 10 minutes. Based on the taxiing time, it is, therefore, necessary to estimate who will still get the 07. If in doubt, calculate conservatively and reclear too early rather than too late.
Aircraft that are with apron control and are to be recleared must be sent back to Delivery since apron control is not allowed to issue route clearances. Delivery will contact Apron and ask them to send aircraft XY to Delivery for a reclearance. Outbounds, which are already at the tower frequency, may of course also be cleared by the tower.
As soon as the aircraft are recleared, taxi instructions to holding point runway 25 are issued. Ideally, the aircraft will reach the holding point 25 when the last inbound 07 has just landed. However, a few minutes delay at the holding point is not a problem in such a situation.
**Exceptions:** SULUS is cleared to 18 and KOMIB does not exist at 25, instead CINDY must be filed.
As soon as the last inbound for 07 is safely on the ground, the tower should inform Approach directly and, to be on the safe side, ask for a **release for the first 25 departure.**
Approach, conversely, must time the inbounds so that the first 25-inbound is approximately on the **10-mile final approach** when the last 07-inbound is just touching down. In case of a missed approach at the last second, this gives enough room to turn away.
If there is a lot of traffic, the downwind and final will automatically be very long. If necessary, aircraft will have to enter a holding for a short time, but this is usually not necessary, since the runway change should be timed as described above so that there is not so much traffic. Within the TMA, Approach can also get creative, e.g. with three-sixties, so that the downwind does not become too long.
As with everything, it is important that the individual ATC stations **communicate and coordinate** so that everyone is fully aware of each other's traffic and plans.
#### Summary
- The decision is based on the METAR and TAF
- The decision is made by the tower supervisor/coordinator, but approach is also involved in the decision
- Approach decides the last arrivals for 07L and 07R
- Tower can issue the last takeoff clearances for 07 until approximately 5 minutes before the last inbounds
- The first inbound for 25 can be on a 10-mile final approach when the last 07-inbound is just touching down
- The first 25 departure should be released by Approach
# Luftnotlage - Lotsenguide
Eine **Luftnotlage**, engl. **Emergency**, ist per Definition ein Notfall eines in der Luft befindlichen Luftfahrzeugs, bei dem schwere und unmittelbare Gefahr droht.
Das Handling eines jeden Notfalls für den Lotsen ist hochindividuell, da keine Situation der anderen gleicht. Dieser Guide soll daher als Grundlage / Orientierung verstanden werden.
#### Relevanz auf Vatsim
Gemäß dem [VATSIM Code of Conduct](https://vatsim.net/docs/policy/code-of-conduct) darf ein Emergency seitens des Piloten nur verkündet werden, wenn er ATC-Service erhält. Der Lotse darf jederzeit und ohne Angabe von Gründen den Piloten auffordern, den Notfall zu beenden. Der Pilot muss dieser Aufforderung sofort nachkommen oder seine Verbindung zum Netzwerk trennen.
Des Weiteren darf keine Entführung simuliert und nicht der Transponder Code 7500 eingestellt werden.
Für euch als Lotse bedeutet das: **Wenn ihr mit dem Handling eines Nofalls nicht vertraut seid, lehnt diesen im Zweifelsfall ab.** **Wenn ihr gerade zu beschäftigt seid (bspw. wegen hoher Verkehrslast), lehnt den Notfall im Zweifelsfall ebenso ab.** Weder der Pilot noch ihr profitiert in irgendeiner Weise, wenn der Notfall unsicher, komplett unrealistisch oder nachlässig abgearbeitet wird.
#### Arten von Notfällen
**Pilotenseitig** wird oft nur zwischen den beiden bekannten Meldungen "Mayday" sowie "Pan Pan" unterschieden:
- Ein "**Mayday**" ist dabei die Meldung eines Notfalls, bei dem eine ernsthafte oder unmittelbar bevorstehende Gefahr besteht und sofortige Unterstützung notwendig ist.
- Ein "**Pan Pan**" ist eine Dringlichkeitsmeldung, bei welcher eine sicherheitsrelevante Situation vorliegt, welche aber keine sofortige Unterstützung benötigt.
**Lotsenseitig** wird der Begriff Notfall deutlich weiter gefasst. Oft wird hier zwischen einem Local Standby, einem Full Emergency und einem Aircraft Accident unterschieden, wobei nicht alle Arten von Notfällen in eine der Kategorien passen.
- Ein **Local Standby** ist ein Luftfahrzeug, von dem bekannt ist oder vermutet wird, dass eine Störung vorliegt, welche aber unter normalen Umständen keine Schwierigkeiten einer sicheren Landung hervorruft. Häufig melden die Piloten dabei weder einen "Pan Pan" noch einen "Mayday", dennoch wird der Flug seitens der Flugsicherung als Notfall betrachtet. Dabei werden bestimmte Maßnahmen eingeleitet, die auf Vatsim jedoch nur simuliert werden können (z.B. Ausrücken der Feuerwehr)
Beispiele für einen Local Standby sind:
- Triebwerksprobleme (z.B. starke Vibrationen, Triebwerksausfall)
- Hydraulikprobleme (z.B. Flaps lassen sich nicht ausfahren)
- Fahrwerksprobleme (z.B. Nose wheel steering ist ausgefallen)
- Rauch / Geruch im Cockpit oder in der Kabine
- Probleme mit der Druckkabine (z.B. gebrochene Windschutzscheibe)
- Strukturelle Probleme (z.B. nach einem Vogelschlag)
- Ein **Full Emergency** ist ein Luftfahrzeug, von dem bekannt ist oder vermutet wird, dass es sich in einem solchen Notfall befindet, dass die Gefahr eines Unfalls gesteht. Die Grenzen zum Local Standby verlaufen dabei manchmal fließend.
Beispiele für einen Full Emergency sind:
- Flugzeugbrand / Triebwerksbrand
- Fahrwerk lässt sich nicht ausfahren
- Ein **Aircraft Accident** ist ein Unfall eines Luftfahrzeuges, welches sich auf dem Flughafen oder in unmittelbarer Flughafennähe befindet
- Weitere Notfälle, welche nicht technischer Natur sind und daher in keine der Kategorien eingeordnet werden können, sind beispielsweise:
- VFR mit Orientierungsverlust
- VFR in IMC
- Medizinischer Notfall im Luftfahrzeug
- Funkausfall
#### Handling eines Notfalls
Da jeder Notfall anders ist, gibt es auch keine pauschale Anleitung für das Handling eines Notfalls. Dennoch gibt es ein Schema, welches helfen kann, in einer Stresssituation strukturiert als Lotse einen Notfall abzuarbeiten. Dieses Schema ist als **ASSIST-Schema** bekannt, wobei jeder Buchstabe für eine Maßnahme steht:
- **A**cknowledge: Als Erstes muss ein Notfall als solcher wahrgenommen werden. Der Lotse sollte also "Mayday" und "Panpan" Meldungen bestätigen und auch sicherstellen, dass die Art des Notfalls und eventuelle Details korrekt verstanden wurden
- **S**eparate: Der umliegende Luftraum sollte je nach Notfall mehr oder weniger freigemacht werden. Dazu zählt, dass im Center- und Approach-Bereich die Staffelung zum betreffenden Flieger erhöht werden sollte, denn die Cockpitbesatzung ist während eines Notfalls sehr mit sich beschäftigt bzw. sehr gestresst und könnte ATC-Anweisungen verspätet oder falsch ausführen. Im Anflug sollte die Piste möglichst früh frei sein, sodass keine "engen" Manöver mit dem betreffenden Luftfahrzeug durchgeführt werden. Gegebenenfalls kann anderen Anflügen ein Fehlanflug angewiesen werden und VFR-Flieger können aufgefordert werden, die Kontrollzone zu verlassen
- **S**upport: Der Pilot sollte so gut wie möglich unterstützt werden. Dabei sollte der Pilot jedoch nicht durch unnötige Funksprüche genervt werden. Folgende Möglichkeiten der Unterstützung gibt es beispielsweise:
- Nach genereller Unterstützung / Absichten fragen
- Nahegelegene / geeignete Flughäfen vorschlagen
- Anflugarten aufzählen / vorschlagen (je nach Wetter können auch Sichtanflüge eine Option sein)
- Bei mehreren Pisten geeignete Pisten vorschlagen (z.B. die längste / breiteste Piste)
- Klären, ob der Pilot nach der Landung die Piste verlassen und / oder normal rollen kann
- Einfache Anweisungen - maximal ein bis zwei Informationen pro Funkspruch
- **I**nform: Andere ATC-Stationen, welche vom Notfall betroffen sind, sollten informiert werden. Beispielsweise gibt der Center den Notfall an den Approach weiter, der Approach an den Tower und der Tower an den Ground. Bei diesem "Stille-Post-Spiel" sollte besonders auf eine korrekte Weitergabe der Informationen gegeben werden
- **S**ilence: Je nach Situation und Verkehrsauslastung kann auf der Frequenz Funkstille verhängt werden. Die Phraseologie lautet dabei gemäß AIP GEN 3.4:
- "*All stations, stop transmitting, MAYDAY*"
Um die Funkstille wieder aufzuheben, wird folgende Phraseologie verwendet:
- "*All Stations, distress traffic ended*"
- **T**ime: Der Pilot sollte niemals vom Lotsen gestresst werden. Ihm sollte ausreichend Zeit zum Lösen seines Problems gegeben werden. Teilweise kann die Entscheidungsfindung und das Abarbeiten der relevanten Checklisten mehrere Minuten dauern
# Identifizierung
Anders als Towerlotsen können Radarlotsen nicht aus dem Fenster schauen, um Flugverkehrsdienste zu erbringen. Sie müssen sich auf Daten verlassen, die von sogenannten Überwachungssystemen gesammelt werden. Beispiele für diese Systeme sind das Primärüberwachungsradar (PSR) und das Sekundärüberwachungsradar (SSR).
#### Primäres Überwachungsradar (PSR - Primary surveillance radar)
Als das Radar erfunden wurde, existierte es nur als Primärradar. Ein Primärradar sendet elektromagnetische Wellen in alle Richtungen aus und zeigt für jede entdeckte Reflexion einen Punkt auf dem Bildschirm an. Es gibt jedoch keine Möglichkeit zu erkennen, welcher Punkt auf dem Bildschirm zu welchem Flugzeug gehört - hier kommt die Identifizierung ins Spiel.
Ein Flugzeug ist identifiziert, wenn wir sein Ziel auf dem Radarschirm sehen und sicher sind, zu welchem Flugzeug es gehört.
Aber wie können wir dann wissen, welches Ziel welches Flugzeug ist, wenn es keine Daten sendet? Bei der Verwendung von PSR gibt es mehrere sogenannte Identifizierungsmethoden \[1\]:
- **Positionsmeldung:** Korrelation eines Ziels mit einem Flugzeug, das seine Position über oder seine Entfernung und Peilung von einem signifikanten Punkt auf dem Bildschirm meldet, und Sicherstellung, dass der Track des Ziels mit dem Pfad / gemeldeten Kurs des Flugzeugs übereinstimmt,
- **Abfliegende Luftfahrzeuge:** Zuordnung eines Ziels zu einem abfliegenden Luftfahrzeug innerhalb von 1 NM vom Ende der Start- und Landebahn,
- **"Turn" Methode:** Anweisung an ein Luftfahrzeug, den Kurs um 30 Grad oder mehr zu ändern, und Beobachtung dieser Änderung,
- **Übertragung der Identifizierung:** Die Identifizierung für einen Flieger kann dir vom einem anderen Lotsen, welchen diesen wiederum identifiziert hat, übergeben werden.
#### Sekundäres Überwachungsradar (SSR - Secondary surveillance radar)
Moderne Überwachungssysteme verwenden eine Sender-Empfänger-Kombination, die Transponder an Bord des Flugzeugs abfragt, die dann Daten an die Bodenstation zurücksenden. Dies ist der grundlegende Unterschied zu PSR-Systemen, bei denen die Bodenstation passive Signale (Reflexionen) empfängt. Es gibt verschiedene Abfragemodi, die unterschiedliche Daten übertragen \[2\]:
| **Mode**
| **Übermittelte Daten**
|
| A
| 4-stelliger oktaler Identifikationscode, z. B. Squawk
|
| C
| Aircraft's pressure altitude |
| S
| Rufzeichen, eindeutige 24-Bit-Adresse, gewählte Höhe, Geschwindigkeit über Grund, angezeigte Fluggeschwindigkeit usw. \[3\] |
Die Modi A und C werden häufig zum Modus 3 A/C zusammengefasst. Bei der Verwendung von SSR gibt es zusätzliche Methoden der Identifizierung:
- Erkennung der Flugzeugkennung auf dem Label,
- Erkennung eines zugewiesenen diskreten Codes, dessen Einstellung vom Piloten bestätigt wurde,
- Beobachtung der Einstellung/Änderung eines angewiesenen individuellen Codes,
- Beobachtung der Einhaltung einer Anweisung zum Squawk IDENT
- Übertragung der Identifizierung: Die Identifizierung für einen Flieger kann dir vom einem anderen Lotsen, welchen diesen wiederum identifiziert hat, übergeben werden.
Die gebräuchlichste Methode zur Identifizierung eines Luftfahrzeugs in unserer simulierten Umgebung ist die "Erkennung der Luftfahrzeug-ID (Rufzeichen) in einem SSR-Label". Wenn man also ein Label mit einem Rufzeichen sehen, ist dieses Rufzeichen mit einem Flugplan verknüpft, und das Flugzeug ist korrekt identifiziert. Wenn ein Pilot nicht in der Lage ist, seinen Transponder einzuschalten, können Sie ihn mit den für das Primärradar aufgeführten Methoden identifizieren.
Bei Vatsim Germany (und mit den Standard ES Paketen) können wir also nahezu jedes Flugzeug als identifiziert ansehen.
Vor der Erbringung von Flugverkehrskontrolldiensten (jeder Dienst, der direkt mit Hilfe eines ATS-Überwachungssystems, z.B. Primär- oder Sekundärradar, erbracht wird) muss der Lotse eine Identifizierung vornehmen und den Piloten informieren.
**Die Information an den Piloten über seine Identifizierung kann ausgelassen werden, wenn der Pilot bereits vom vorherigen Sektor identifiziert wurde.**
#### Ablesen und Abweichung von Werten des Transponders
Dieses Thema ist auf Vatsim weniger relevant als in der Realität. Dort gibt es deshalb auch diverse Regeln, wann ein Level als "erreicht", "gehalten" oder "verlassen" gilt. Für Vatsim reicht es hier jedoch aus, grundsätzlich von einer Toleranz von 200 ft auszugehen. Wichtig ist jedoch, dass dies nicht ausgenutzt werden soll, um Staffelungsunterschreitungen zu rechtfertigen. In jedem Falle sollen Piloten auf Abweichungen angesprochen (und z.B. um Korrektur der Altimetereinstellungen gebeten) werden.
\[1\] ICAO Doc 4444, Procedures for air navigation services - Air traffic management, Sixteenth edition, 2016
\[2\] [Aviation transponder interrogation modes, Wikipedia](https://en.wikipedia.org/wiki/Aviation_transponder_interrogation_modes)
\[3\] [Skybrary Mode S](https://www.skybrary.aero/articles/mode-s)