Grundlagen der Navigation (NAV01)
Diese Seite befindet sich derzeit im Aufbau. Einige der angebotenen Inhalte können unvollständig sein oder Fehler enthalten.
Dieses Modul aus der Kategorie: Navigation behandelt die Grundlagen der Navigation, für NAV01 werden keine anderen Module vorausgesetzt.
Allgemeine Grundlagen
- 000º ist Nord
- 090º ist Ost
- 180º ist Süd
- 270º ist West

Koordinatensystem
Um Positionen auf der Erde genau bestimmen zu können, ist die Welt in einem Koordinatensystem definiert. Das meistgenutzte Modell ist das WGS 84 (World Geodetic System), welches 1984 in den USA definiert wurde, man sieht es auch als das genaueste Modell der Erde. Es ist wichtig bei der Navigation zu verstehen, dass die Erde keine perfekte Sphäre ist, sondern am Nord- und Südpol etwas abgeflacht ist. Der Durchmesser der Erde ist zwischen Nord- und Südpol 43km geringer als am Equator.
Die Erde ist in Längengrade (Latitude) und Breitengrade (Longitude) eingeteilt. 0º Nord/Süd ist der Äquator und 0º West/Ost ist der sogenannte Nullmeridian oder Meridian von Greenwich.
Je nach benötigter Präzision werden Koordinaten unterschiedlich geschrieben:
| Schreibweise | Präzision | Anwendungsbereich |
|---|---|---|
| 5321N | 1 nm = 1,852 km | Enroute-navigation |
| 5321.3N | 185 m | INS, IRS, FMS, GPS |
| 53º21´17´´N | 30 m | Flughafendiagramme |
| 53º21´17.3´´N | 3 m | Position von ILS |
| 53º21´17.32´´N | 30 cm | Kalibrierung von Präzisionsanflügen (ILS) |
Hier ist es wichtig zu verstehen, dass die Ziffern an dritter und vierter Stelle nur bis 59 gehen (bei den Beispielen in der Tabelle also die Ziffern 21). Bei Gradzahlen gibt es wie bei der Zeit Minuten. Ein Grund wieso man dies in der Fliegerei auf diesem Weg definiert ist, dass eine Gradminute (also ein sechzigstel Grad) latitude eine nautische Meile entspricht. Beispiel: 01´ ist eine Gradminute und 01´´ ist eine Gradsekunde. Wichtig: bei der Longitude ist dies, bis auf den Äquator, nicht der Fall!
Groß- und Kleinkreise
Ein Großkreis beschreibt die kürzeste Distanz zwischen zwei Punkten, und wenn man diesen weiterführt teilt er die Erde in zwei gleich große Teile. Zwei Beispiele für einen Großkreis sind der Äquator und alle Meridiane (Längengrade).
Ein Kleinkreis sind alle Verbindungen zwischen zwei Punkten, welche kein Großkreis sind, Beispiel dafür sind alle Breitengrade bis auf den Äquator.
Beim abfliegen eines Groß- oder Kleinkreises hält man keinen konstanten Steuerkurs, daher benötigt man dafür Navigationssysteme. Beim Navigieren mit Hilfe von VORs und NDBs fliegt man automatisch einen Großkreis, da hier die Distanzen allerdings relativ gering sind, fällt einem keine Änderung des Steuerkurses auf. Dies bemerkt man erst sobald man sehr lange Distanzen zwischen zwei Wegpunkten hat, wie z.B. beim überqueren vom Atlantik, für welches man dann ein Long-Range Navigationssystem benötigt (IRS, INS oder GPS), diese werden im Modul NAV02 behandelt.
Folgend ein Beispiel eines Großkreises: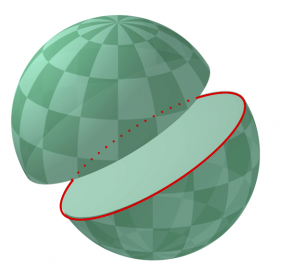
Folgend ein Beispiel eines Kleinkreises: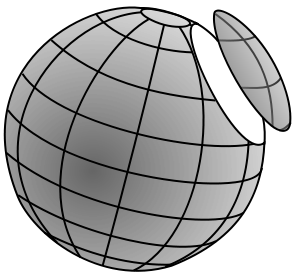
Loxodrome
Eine Loxodrome ist eine Verbindung zwischen zwei Punkten welche alle Meridiane im gleichen Winkel schneidet, dadurch würde man beim abfliegen einer Loxodrome auch einen konstanten Steuerkurs behalten. Beispiele für eine Loxodrome sind alle Breitengrade, da diese alle Meridiane im 90-Grad Winkel schneiden.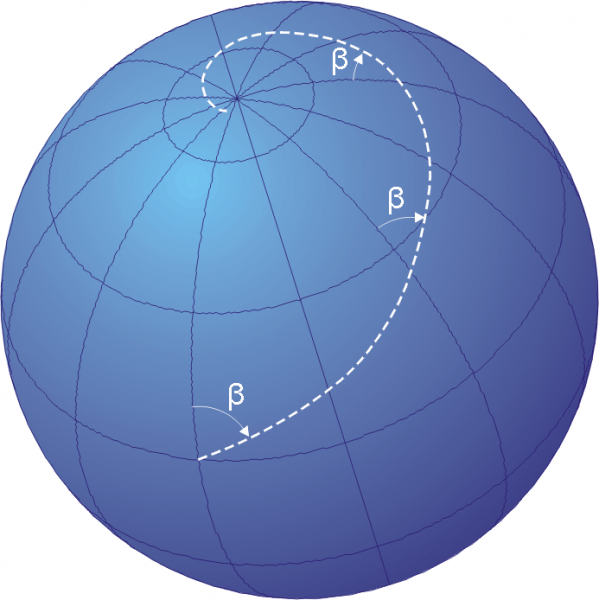
Karten
Karten sind ein wichtiger Bestandteil der Navigation, und es ist auch per Gesetz vorgeschrieben diese an Bord zu haben. Im Airline-betrieb benutzt man heutzutage vor allem Digitale Karten. Bei VFR-flügen hat man allerdings häufig noch physische Karten an Bord, welches auch dem geschuldet ist, dass viele General-Aviation Flugzeuge keine GPS-systeme mit integrierten Karten installiert haben (wie z.B. das G1000), und Kartenprogramme sehr teuer sind. Daher ist es wichtig die Unterschiede zwischen den unterschiedlichen Kartenprojektionen zu verstehen.
Mercator-Projektion
Die Mercator-Projektion ist eine Zylinderprojektion, man kann sich also vorstellen, dass man ein Blatt Papier als Zylinder um die Erde herum formt, die Erde auf das Blatt projiziert, und diese dann wieder glatt auslegt. Die Mercator-Projektion ist zwar Winkeltreu, hat allerdings andere Fehler. Sie ist über größere Distanzen weder flächen- noch richtungstreu. Dies sieht man im Beispiel auch ganz gut, dass z.B. Grönland viel größer dargestellt wird als es tatsächlich ist.
Loxodromen werden als gerade Linien dargestellt und Großkreise sind konkav zum Äquator.
Die Mercator-Projektion wird von Openstreetmaps sowie Bing maps benutzt.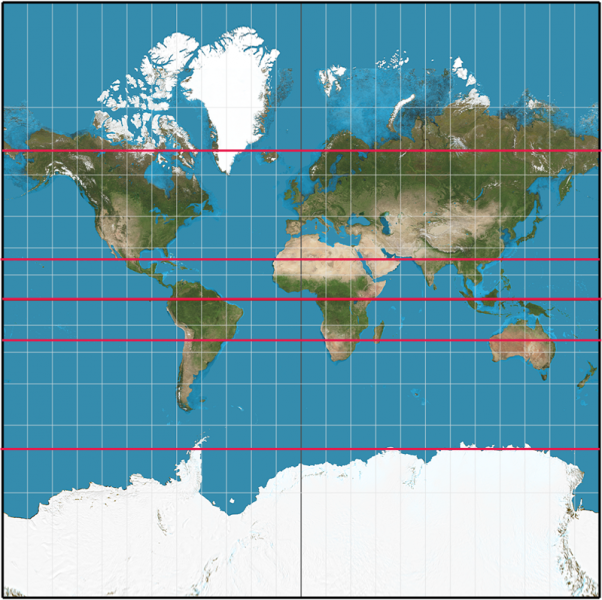
Lamberts winkeltreue Kegelprojektion
Wie der Name schon sagt ist dies eine Kegelprojektion, dass heißt zum Beispiel, wird ein Blatt Papier zu einem Kegel geformt, und auf die Erde gesetzt. Das Ergebnis sieht man auch im Beispiel weiter unten sehr gut. Die Lambertkarte hat allerdings im vergleich zu älteren Kegelprojektionen einen Unterschied. Normalerweise berührt das Blatt nur einen Punkt der Erdoberfläche (bzw. eine Latitude), bei der Lambertprojektion schneidet das Blatt Papier durch die Erde, und berührt damit die Fläche zwei mal (an zwei unterschiedlichen Latituden), diese nennt man auch Standardparallelen. Mittig zwischen den Standardparallelen liegt die sogenannte Parallel of Origin.
Großkreise sind fast gerade Linien, Loxodromen sind konkav zum Pol der Projektion (im Beispiel zum Nordpol). Die Skala expandiert von den Standardparallelen und kontrahiert zwischen ihnen, dass bedeutet das die Skala am Parallel of Origin am kleinsten ist, und am ende der Karte (Nord und Süd) am größten ist. Die meisten Karten in der Luftfahrt sind Lambert-Karten.
