Grundlagen der Navigationsverfahren (NAV02)
Diese Seite befindet sich derzeit im Aufbau. Einige der angebotenen Inhalte können unvollständig sein oder Fehler enthalten.
Dieses Modul aus der Kategorie: Navigation behandelt die Grundlagen der Navigation, für NAV01 werden keine anderen Module vorausgesetzt.
Allgemeine Grundlagen
- 000º ist Nord
- 090º ist Ost
- 180º ist Süd
- 270º ist West

© faa.gov
Koordinatensystem
Um Positionen auf der Erde genau bestimmen zu können, ist die Welt in einem Koordinatensystem definiert. Das meistgenutzte Modell ist das WGS 84 (World Geodetic System), welches 1984 in den USA definiert wurde, man sieht es auch als das genaueste Modell der Erde. Es ist wichtig bei der Navigation zu verstehen, dass die Erde keine perfekte Sphäre ist, sondern am Nord- und Südpol etwas abgeflacht ist. Der Durchmesser der Erde ist zwischen Nord- und Südpol 43km geringer als am Equator.
Die Erde ist in Längengrade (Latitude) und Breitengrade (Longitude) eingeteilt. 0º Nord/Süd ist der Äquator und 0º West/Ost ist der sogenannte Nullmeridian oder Meridian von Greenwich.
Je nach benötigter Präzision werden Koordinaten unterschiedlich geschrieben:
| Schreibweise | Präzision | Anwendungsbereich |
|---|---|---|
| 5321N | 1 nm = 1,852 km | Enroute-navigation |
| 5321.3N | 185 m | INS, IRS, FMS, GPS |
| 53º21´17´´N | 30 m | Flughafendiagramme |
| 53º21´17.3´´N | 3 m | Position von ILS |
| 53º21´17.32´´N | 30 cm | Kalibrierung von Präzisionsanflügen (ILS) |
Hier ist es wichtig zu verstehen, dass die Ziffern an dritter und vierter Stelle nur bis 59 gehen (bei den Beispielen in der Tabelle also die Ziffern 21). Bei Gradzahlen gibt es wie bei der Zeit Minuten. Ein Grund wieso man dies in der Fliegerei auf diesem Weg definiert ist, dass eine Gradminute (also ein sechzigstel Grad) latitude eine nautische Meile entspricht. Beispiel: 01´ ist eine Gradminute und 01´´ ist eine Gradsekunde. Wichtig: bei der Longitude ist dies, bis auf den Äquator, nicht der Fall!

Groß- und Kleinkreise
Ein Großkreis beschreibt die kürzeste Distanz zwischen zwei Punkten, und wenn man diesen weiterführt teilt er die Erde in zwei gleich große Teile. Zwei Beispiele für einen Großkreis sind der Äquator und alle Meridiane (Längengrade).
Ein Kleinkreis sind alle Verbindungen zwischen zwei Punkten, welche kein Großkreis sind, Beispiel dafür sind alle Breitengrade bis auf den Äquator.
Beim abfliegen eines Groß- oder Kleinkreises hält man keinen konstanten Steuerkurs, daher benötigt man dafür Navigationssysteme. Beim Navigieren mit Hilfe von VORs und NDBs fliegt man automatisch einen Großkreis, da hier die Distanzen allerdings relativ gering sind, fällt einem keine Änderung des Steuerkurses auf. Dies bemerkt man erst sobald man sehr lange Distanzen zwischen zwei Wegpunkten hat, wie z.B. beim überqueren vom Atlantik, für welches man dann ein Long-Range Navigationssystem benötigt (IRS, INS oder GPS), diese werden im Modul NAV02 behandelt.
Folgend ein Beispiel eines Großkreises: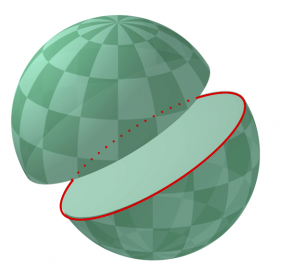
Folgend ein Beispiel eines Kleinkreises: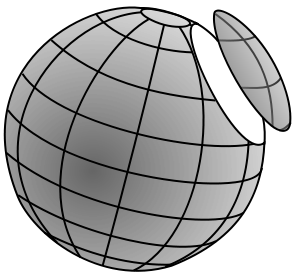
Loxodrome
Eine Loxodrome ist eine Verbindung zwischen zwei Punkten welche alle Meridiane im gleichen Winkel schneidet, dadurch würde man beim abfliegen einer Loxodrome auch einen konstanten Steuerkurs behalten. Beispiele für eine Loxodrome sind alle Breitengrade, da diese alle Meridiane im 90-Grad Winkel schneiden.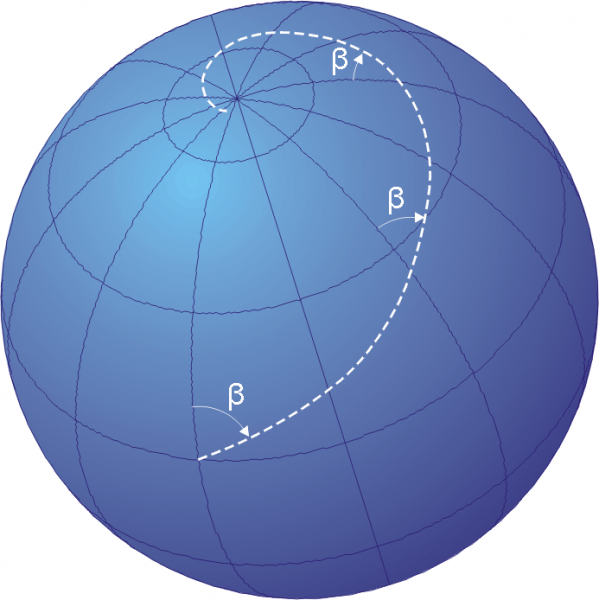
Karten
Karten sind ein wichtiger Bestandteil der Navigation, und es ist auch per Gesetz vorgeschrieben diese an Bord zu haben. Im Airline-betrieb benutzt man heutzutage vor allem Digitale Karten. Bei VFR-flügen hat man allerdings häufig noch physische Karten an Bord, welches auch dem geschuldet ist, dass viele General-Aviation Flugzeuge keine GPS-systeme mit integrierten Karten installiert haben (wie z.B. das G1000), und Kartenprogramme sehr teuer sind. Daher ist es wichtig die Unterschiede zwischen den unterschiedlichen Kartenprojektionen zu verstehen.
Mercator-Projektion
Die Mercator-Projektion ist eine Zylinderprojektion, man kann sich also vorstellen, dass man ein Blatt Papier als Zylinder um die Erde herum formt, die Erde auf das Blatt projiziert, und diese dann wieder glatt auslegt. Die Mercator-Projektion ist zwar Winkeltreu, hat allerdings andere Fehler. Sie ist über größere Distanzen weder flächen- noch richtungstreu. Dies sieht man im Beispiel auch ganz gut, dass z.B. Grönland viel größer dargestellt wird als es tatsächlich ist.
Loxodromen werden als gerade Linien dargestellt und Großkreise sind konkav zum Äquator.
Die Mercator-Projektion wird von Openstreetmaps sowie Bing maps benutzt.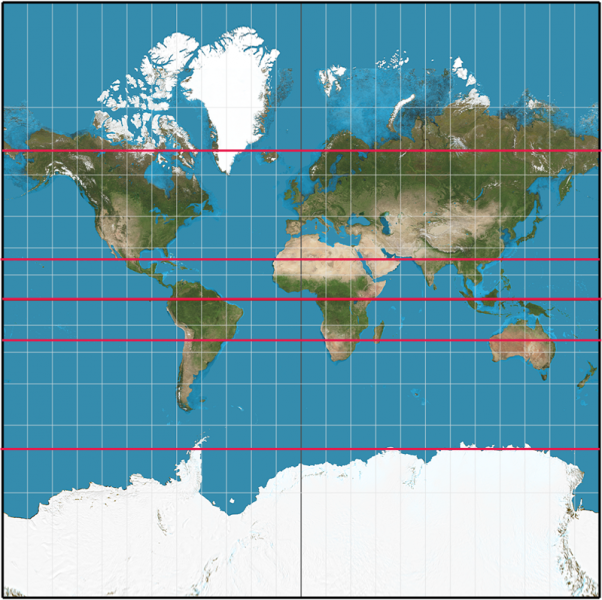
Lamberts winkeltreue Kegelprojektion
Wie der Name schon sagt ist dies eine Kegelprojektion, dass heißt zum Beispiel, wird ein Blatt Papier zu einem Kegel geformt, und auf die Erde gesetzt. Das Ergebnis sieht man auch im Beispiel weiter unten sehr gut. Die Lambertkarte hat allerdings im vergleich zu älteren Kegelprojektionen einen Unterschied. Normalerweise berührt das Blatt nur einen Punkt der Erdoberfläche (bzw. eine Latitude), bei der Lambertprojektion schneidet das Blatt Papier durch die Erde, und berührt damit die Fläche zwei mal (an zwei unterschiedlichen Latituden), diese nennt man auch Standardparallelen. Mittig zwischen den Standardparallelen liegt die sogenannte Parallel of Origin.
Großkreise sind fast gerade Linien, Loxodromen sind konkav zum Pol der Projektion (im Beispiel zum Nordpol). Die Skala expandiert von den Standardparallelen und kontrahiert zwischen ihnen, dass bedeutet das die Skala am Parallel of Origin am kleinsten ist, und am ende der Karte (Nord und Süd) am größten ist. Die meisten Karten in der Luftfahrt sind Lambert-Karten.

© Daniel R. Strebe, 15.08.2011
Stereografische Projektion
Die Stereografische Projektion wird meistens für die Darstellung des Nord- oder Südpols verwendet. Sie ist eine Ansicht direkt von oben über den Pol, im Beispiel ist eine Stereografische Karte über den Nordpol, welche zur Erklärung über den Äquator hinausgeht (welches durch eine einfache Projektion nicht möglich ist). Meridiane sind gerade Linien, welche vom Pol ausgehen. Großkreise sind fast gerade Linien und die Loxodromen sind konkav zum Pol der Projektion. Die Skala expandiert je weiter man sich vom Pol entfernt (im Beispiel ist dies gut zu sehen), hält sich allerdings innerhalb folgender Limitationen:
- Zwischen 90° und 78° weniger als 1% Expansion
- Bis 70° maximal 3% Expansion
Google Maps benutzt seit einiger Zeit die Stereografische Projektion.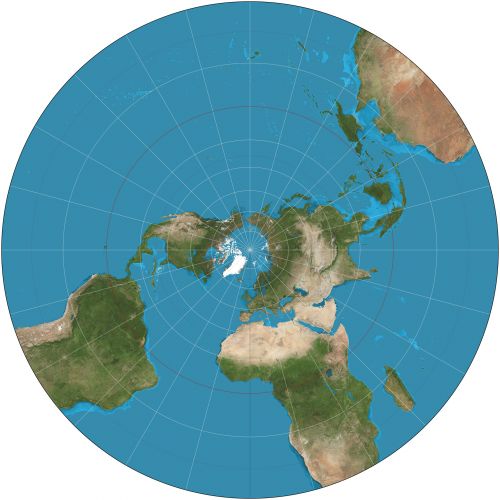
© Daniel R. Strebe, 15.11.2012
Zeit
Die Zeit ist ein wichtiger Teil der Navigation, der folgende Text dient zu Erklärung wie Zeitzonen aufgebaut sind.
UTC oder Coordinated Universal Time, ist die Zeit nach welcher sich alle Uhren richten, sie ändert sich nie. Zeitzonen werden ebenfalls mit Hilfe von der UTC definiert.
Zeitzonen sind das Ergebnis durch die Rotation der Erde um ihre eigene Achse:
Die Erde dreht sich innerhalb von 24 Stunden einmal um ihre eigene Achse (360°), dadurch entsprechen 15° Rotation 1 Stunde und 1° Rotation 4 Minuten.
Zur definition von Zeitzonen ist die Welt in 25 Stücke aufgeteilt, diese sind jeweils 15° breit. Als Beispiel ist die UTC-Zeitzone 7,5° W bis 7,5° E, alle weiteren Zeitzonen sind in Richtung Osten mit UTC+1, UTC+2 etc. und Richtung Westen mit UTC-1, UTC-2 etc. definiert. Nach diesen Zeitzonen wurden auch die Reellen Zeitzonen (Zeitzonen in den einzelnen Ländern) definiert. Die Zeitzonen werden vor allem in der Schifffahrt verwendet.
Mit diesen Informationen können wir Zeiten umrechnen:
Beispiel 1:
Wir starten in Frankfurt (UTC+1) um 10:00 Uhr Lokalzeit, und fliegen mit einer Flugzeit von 7 Stunden nach New York (UTC-5), um wie viel Uhr Lokalzeit kommen wir an?
Als erstes berechnen wir die UTC Zeit:
10:00 Uhr Abflug bei UTC+1, also ist UTC 10:00 - 1:00 = 09:00z
Dann addieren wir die Flugzeit:
09:00 + 07:00 = 16:00z Ankunft
Und rechnen dies nun wieder in Lokalzeit um:
Da New York UTC-5 ist, 16:00 - 05:00 = 11:00 Uhr Lokalzeit in New York
Beispiel 2:
Wir starten in Los Angeles (UTC-8) am 01.02 um 07:00 Uhr Lokalzeit, und fliegen mit einer Flugzeit von 11:20 Stunden nach Tokyo (UTC+9), um wie viel Uhr Lokalzeit kommen wir an?
Als erstes berechnen wir die UTC Zeit:
07:00 Uhr Abflug bei UTC-8, also ist UTC 07:00 + 08:00 = 15:00z am 01.02
Dann addieren wir die Flugzeit:
15:00 + 11:20 = 02:20z Ankunft am 02.02
Und rechnen dies nun wieder in Lokalzeit um:
Da Tokyo UTC+9 ist, 02:20 + 09:00 = 11:20 Uhr Lokalzeit am 02.02 in Tokyo.
Grundlagen der Sichtnavigation
Grundlagen
Dazu zählen: - Sichten - Hauptwolkenuntergrenze - Abstand zu den Wolken - Wettererscheinungen
Diese variieren von Luftraum zu Luftraum.
Des Weiteren ist bei der Sichtnavigation darauf zu achten, dass man nicht nur nach draußen schaut um sich zu orientieren, sondern auch, um den Luftraum zu beobachten. Sollte ein Flugzeug auftauchen, muss nach den Ausweichregeln verfahren werden.
Sichtflugpunkte
Sichtflugpunkte sind geographische Stellen in der Landschaft, die sich stark von dem umliegenden Territorium abgrenzen. Dazu zählen Straßen, Flüsse, Seen, Berge, Landschaftszüge, Wälder, Fabriken und viele mehr. Dabei unterscheidet man zwei Hauptgruppen. Einmal die wirklichen Punkte die nur an einer Stelle existieren und Strecken die einen Verlauf aufweisen.
- Punkte
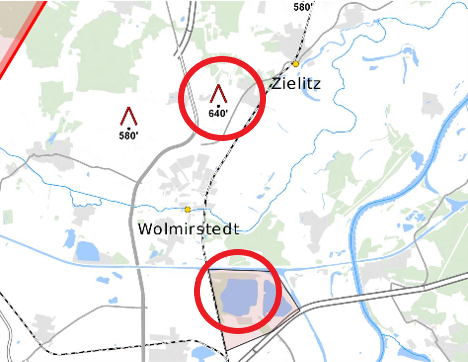
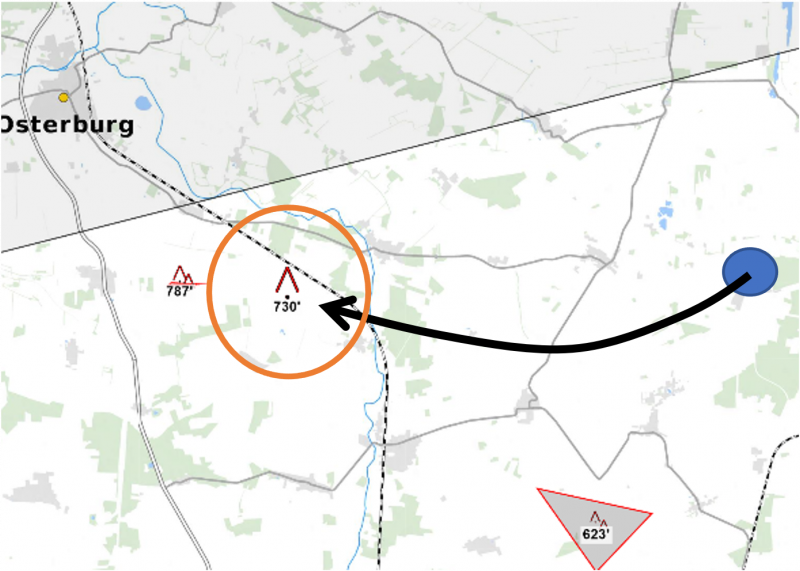
Dazu zählen Windmühlen, Städte, Berge… Als Beispiel ist eine geographische Erhebung dargestellt nördlich von Magdeburg. Diese ist bei gutem Wetter über 50km weit zu sehen. Im Vordergrund sieht man einen See, an dem man sich auch orientieren könnte.
In der Karte von openflighmaps sind beide dargestellt. Man sollte sich in der Flugvorbereitung schon mit solchen Punkten entlang der Strecke auseinandersetzen.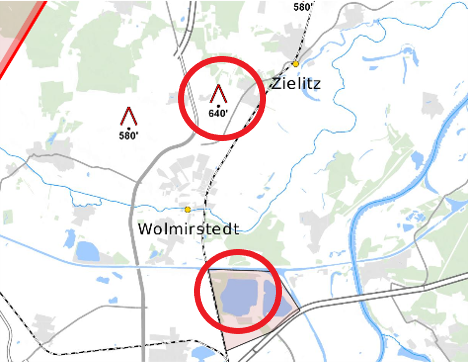

- Strecken
Flüsse, Straßen, geographische Landschaften (Küste) … können zum Navigieren entlang oder mit einer Strecke genutzt werden. Im Bild sieht man die Elbe. Sie ist natürlich eine Strecke, die man kaum verfehlen kann. Somit ist sie leicht erkennbar, auch von der Ferne.
In der Karte von Openflighmaps ist die Elbe dann auch als Fluss dargestellt. Man sieht außerdem die kleineren Flussarme, sowie Brücken etc. Somit ist auch eine Positionsbestimmung entlang einer Strecke möglich.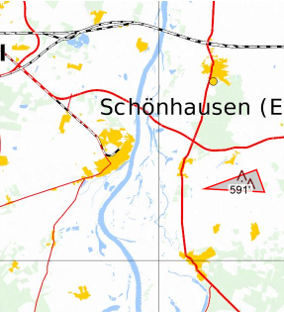


Wenn wir dann zur Streckenplanung kommen wird diese nach vier Punkten durchgeführt:
- Strecke planen
- Route berechnen
- Platzinformationen
- Fluginformationen
Weiter sollte die Vorbereitung mindestens folgende Informationen enthalten:
| Rufzeichen | |
|---|---|
| Startflughafen, Zielflughafen, Ausweichflughafen |
Name ICAO-Code Frequenz Rufzeichen Platzrundenrichtung Platzrundenhöhe Pistenbeschaffenheit Pistenlänge/Ausrichtung |
| FIS | Frequenz/Gebiet/Bemerkung |
| Route | |
| Routeninformation | Auffanglinie |
| Entfernung | DCT TRUE |
| True Heading | TC |
| Variation | TH |
| Deviation | CH |
| Wetter: Startflughafen, Zielflughafen, Ausweichflughafen |
QNH Windrichtung Windstärke Sichtweite Wolken Trend |
| Flughöhe | |
| Geschwindigkeit | IAS, TAS, GS |
| Flugzeit | |
| GAFOR | Durchschnittliche Windrichtung Durchschnittliche Wingeschwindigkeit Temperatur |
| Treibstoffverbrauch | |
| Extra Treibstoff | |
| Treibstoff |
Auffanglinie
Die Auffanglinie ist eine Sicherheitsfunktion beim Fliegen, die unerlässlich ist. Sie schützt den Pilot vor Fehlern und deren Folgen. Deshalb gehört sie in jede Flugplanung dazu. Sie stellt extrem markante Punkte oder Strecken abseits der Strecke dar, die einen Piloten darauf aufmerksam machen, dass er sich verflogen hat und geben einen neuen Start zur Orientierung. Beispielsweise wenn ich zu einem Flughafen an der Ostsee aus Richtung Süden fliege und an der Küste bin weiß ich das ich den Flughafen hätte schon längst sehen müssen und kann dann an der Küste weiterfliegen um mich neu zu orientieren. Die Ostsee ist dabei unübersehbar und die Küstenformationen markant.
Verhalten in besonderen Fällen
Jeden Piloten kann es passieren, dass eine unerwartete Situation auftritt, auf die er nicht vorbereitet ist. Dafür hat die Luftfahrt zum Glück genug Backups, damit es zu keinen Unfällen kommt.
Orientierungsverlust Falls man während der Navigation die Orientierung verliert ist es wichtig, erstmal die Ruhe zu bewahren. Im nächsten Schritt fliegt man idealerweise zu seiner Auffanglinie. Falls diese nicht auffindbar ist versucht man eine Radarlotsen zu erreichen. Dabei ist es ganz egal welcher, Hauptsache er ist in der Nähe. Es ist auch nicht schlimm dies zu tun, auch kein Anfängerfehler, das ist Professionalität, da der Orientierungsverlust eine Dringlichkeitsmeldung ist. In der Realität steht neben den normalen Frequenzen auch die Notfallfrequenz 121.500 zur Verfügung.
Schlechtes Wetter Für das Fliegen auf Sicht müssen die Sichtflugmindestbedingungen erfüllt sein. Bei schlechtem Wetter kann es passieren, dass dies nicht mehr gegeben ist und der Rückweg auch von einer Wolkenfront versperrt wird. In einer solchen Situation ist unverzüglich eine Sicherheitsaußenlandung durchzuführen, sofern das möglich ist. Ansonsten kann weitere Hilfe auch wieder durch Radarlotsen in Anspruch genommen werden.
Grundlagen der Koppelnavigation
Definition
Anwendung
Von der Flugplanung kennen wir den Kurs den wir auf der Strecke fliegen wollen, sowie die Geschwindigkeit über Grund an dieser Stelle. Nun müssen wir folgende Überlegung anstellen: Wenn ich eine bestimmte Zeit eine bestimmte Geschwindigkeit fliege, lege ich einen bestimmten Weg zurück oder anders herum, wenn ich weiß wie lange die gesamte Strecke ist, kann ich die Zeit errechnen, die für diese Strecke benötigt wird. Die Berechnung erfolgt nach dem Weg-Zeit-Gesetz. Dabei gilt: v=s/t. Die Formel kann dann beliebig umgestellt werden. Ein Problem, was sich bei dieser Methode auftut, ist der Wind der nur teilweise mit einberechnet werden kann, sowie die Ungenauigkeiten der Instrumente. Somit kann es zu leichten Abweichungen des Endpunktes kommen und das endgültige Navigieren zu einem Sichtflugpunkt bleibt unerlässlich.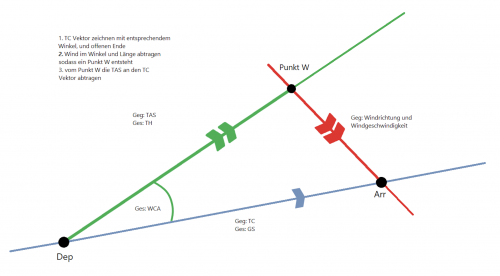
Als Erstes wird der Vektor TC mit dem Winkel zwischen Dep und Arr gezeichnet, wobei beide Punkte nicht auf der Geraden markiert werden. Nun wird der Punkt Arr festgelegt und von diesem Winkel des Windes ein weiterer Vektor gezeichnet. Dieser ist solang wie die Windgeschwindigkeit ist. Dabei kann man das Größenverhältnis zwischen kt und cm auf dem Blatt frei wählen, es muss nur im gesamten Schema konstant bleiben. (Beispiel: 10kt = 1cm) Aus der Windgeschwindigkeit ergibt sich dann auf dem Vektor des Windes der Punkt W. Von diesem wird nun mit einem Zirkel, der auf die Länge der Geschwindigkeit eingestellt ist, der Punkt Dep auf dem Vektor TC abgetragen. Alle weiteren Werte können danach einfach mit einem Geodreieck abgelesen werden.
Anwendungsbereiche
Hauptsächlich wird diese Methode genutzt, wenn die Sichtnavigation in dem Moment nicht möglich ist. Dies kann z.B. direkt nach dem Start sein, wo man einen hohen Anstellwinkel hat und so die Sicht nach draußen eingeschränkt ist. Die Methode wird außerdem gebraucht, falls keine Sichtflugpunkte vorhanden sind. Ein Klassiker ist da eine Meeresüberquerung.
Grundlagen der Funknavigation
Auch als VFR-Pilot ist es gut die Grundlagen der Funknavigation zu beherrschen, dies kann in gewissen Situationen das Navigieren erleichtern. Es ist allerdings wichtig zu verstehen, dass man als Pilot beim Fliegen nach Sichtflugregeln (VFR) auch bei verwendung von Hilfsmitteln, wie der Funknavigation, nicht von der Pflicht befreit ist nach Sicht zu fliegen.
NDB
Der NDB, oder Non-directional Beacon, ist ein sehr altes Navigationsmittel, welches auf dem Frequenzband 190 bis 1750 kHz sendet. Die grundlegende Funktionsweise ist, dass der NDB ein Signal in alle Richtungen aussendet, um von einem Flieger erfasst zu werden. Dies passiert mit den sogenannten ADF (Automatic Direction finder), welcher aus zwei Antennen besteht und damit die Richtung, aus welcher das Signal kommt, erfasst und dem Piloten mit Hilfe eines RBIs oder RMIs anzeigt.
Ein RBI (Radio Bearing Indicator) ist das ältere Instrument, bei welchem man den Steuerkurs selber einstellen muss.
© faa.gov
Ein RMI (Radio Magnetic Indicator) zeigt ebenfalls den Steuerkurs an, und man kann dadurch den Kurs, aus welchem das Signal kommt feststellen. Der RMI ist zeigt auch meistens Informationen zu einem VOR an (in diesem Bild die gelbe Nadel) und bei einem Glass Cockpit auch GPS-Wegpunkte.

© faa.gov
VOR
Ein VHF (very high frequency) Omnidirectional Radio Range, kurz VOR (dt. Drehfunkfeuer) ist ein flugnavigatorisches Funkfeuer. Ein Flugzeug kann damit die Richtung zur bzw. von der Station (Radial) bestimmen. VORs senden im Frequenzband 108,00 bis 117,95 MHz, wobei bestimmte Frequenzen des Bandes für ILS-Sender freigehalten werden.
Funktionsweise
Durch ein Impulssignal und ein separates, umlaufendes Signal kann vom Luftfahrzeug durch Laufzeitmessung die Richtung zur Station (zum VOR) bestimmt werden. Je nachdem, wie lange der zeitliche Abstand zwischen dem jeweiligen Empfang der beiden Signale ist, wird dadurch das Radial festgelegt, auf dem sich das Luftfahrzeug befindet.
Ein gemessenes Umlaufsignal nach der Hälfte der Zeit zwischen den Rund-Impulssignalen ergibt damit das Radial 180 (R180), also südlich (180°) des Funkfeuers. VORs sind üblicherweise missweisend (also magnetisch Nord) ausgerichtet.
Ein allein stehendes VOR übermittelt somit lediglich Richtungsangaben, keine Entfernungen! Für eine Positionsbestimmung ist ein zweites Funkfeuer (Kreuzpeilung) oder ein mit dem VOR gekoppeltes DME erforderlich.
© by Wikipedia user Orion 8, CC-BY-SA 3.0
Grundsätzlich fliegt man ein Radial wie einen Localizer in einem Anscheidewinkel an, um sich an ihm auszurichten. In der Regel benutzen Piloten dafür sogar die selben Instrumente. Meist kommt der Course Deviation Indicator (CDI) oder ein Horizontal Situation Indicator (HSI) zum Einsatz, der entweder separat als Instrument oder (in Glascockpits) in das Navigationsdisplay (ND) integriert vorhanden ist.
Radiale zeigen immer von der Station (VOR) weg, d.h. für einen Kurs zur Station muss der Pilot den Gegenkurs des Radials einschlagen (z.B. HDG 360° auf dem R180 des VORs).

DME
ILS
Grundlagen der Satellitennavigation
GNSS
| Name | Land | Jahr | Anzahl der Satelliten |
|---|---|---|---|
| NAVSTAR GPS | USA | 1995 | 24 |
| GLONASS | Russland | 2011 | 24 |
| GALLILEO | Europa | 2020 | 30 |
| COMPASS | China | 2020 | Bis zu 35 |
Alle Systeme funktionieren unabhängig voneinander.
Grundsätzliche Funktionsweise
Satellit sendet ein Taktsignal und Datenpaket.
- Empfänger, in unserem Fall das Flugzeug, liest dieses aus und berechnet, zu dem sichtbaren Satellit, seine Position im Raum.
- Der Empfänger besteht aus einer Antenne und Prozessor, der alle vier notwendigen Dimensionen ausrechnet.
Für Zeit, Höhe, Länge und Breite benötigt er das Signal von mindestens vier Satelliten. Die Genauigkeit ist dabei Abhängig von der Genauigkeit der Messung und der relativen Position (Geometrie) der sendenden Satelliten. Grundsätzlich lässt sich so die Position eines Flugzeuges bestimmen, jedoch genügt dies nicht der Luftfahrt zur Überwachung des Systems.
Es ist notwendig eines der Überwachungssysteme an Bord zu haben:
- ABAS aircraft-based augmentation system
- GBAS ground-based augmentation system
- SBAS satellite-based augmentation system
Grenzen des GNSS
Die Welt ist im Umbau von herkömmlichen NAVAIDs zu modernen, günstigeren GNSS Methoden. Dabei müssen Staaten bestimmte Punkte beachten um die Sicherheit nicht zu gefährden:
- Der Staat muss sicherstellen das immer genug Satelliten zu Verfügung stehen oder NAVAIDs als Backup haben. Es bietet sich an die Performance von GNSS durch GBAS und SBAS zu unterstützen in kritischen Regionen
- Interferenzen müssen ausgeschlossen werden
- Zum sicheren navigieren mit GNSS muss eine Datenintegrität gewährleistet werden
Anwendung in der General Aviation
In kleineren Maschinen, die Satellitennavigation unterstützen kommen hauptsächlich zwei Trägersysteme zum Einsatz, das G1000 und GTN750. Beide Systeme können sowohl für VFR als auch IFR genutzt werden. Dies ist für VFR Flieger aber keine Entbindung von jeglichen anderen Verpflichtungen, das Fliegen nach Sicht.