Conflict Solving
This article describes the typical methods and controller actions used to solve conflict between aircraft in a surveillance (mostly en-route) environment. Only situations with two participating aircraft are considered. Although more complex scenarios (involving three or more aircraft) do exist, they happen rarely and in most cases can be considered as multiple two-aircraft cases that happen at the same time.
In broader terms, a conflict is a situation where the separation at the closest point of approach will be less than the specified minimum and one of the following exists:
- Two aircraft are flying at the same level. In this case, doing nothing will result in a Loss of Separation. There are two sub-scenarios to this:
- Crossing conflict - the two aircraft's paths cross at some point and diverge afterwards.
- Converging conflict - the two aircraft's paths join at some point and remain the same afterwards, at least for a portion of the flight.
- Crossing conflict - the two aircraft's paths cross at some point and diverge afterwards.
- At least one of the aircraft is climbing or descending to a level that will make it cross the other aircraft's level. In this case, doing nothing may lead to a loss of separation depending on the circumstances (e.g. vertical speed, distance between the aircraft, current vertical separation, etc.)
- The two aircraft are vertically separated but at least one of them needs to be cleared to a level that would cross the other's level (e.g. due to reaching the top of descent). Here, doing nothing will not cause loss of separation. However, improper timing of the instruction to change level may lead to this.
The second and the third situation usually happen near the transition between approach and area control. This is where departing aircraft reach their cruising level and arrivals start preparation for the final portion of the flight. The first one is more typical to the cruising part of the flight.
Action to be taken by the controller in order to eliminate the risk of separation breach depends on a number of factors such as the type of conflict, the specific circumstances, the available aircraft performance, controller workload, etc. The most common methods for solving conflicts are:
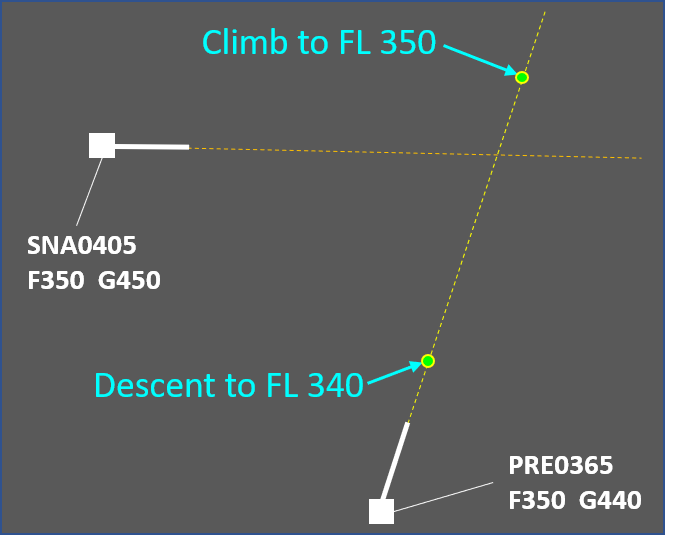
- Level change. This solution is typically used for conflicting aircraft in level flight. In the crossing case, an opposite level may be used for a short time and then the aircraft will climb again to its cruising level. This is not an option in the converging scenario, meaning that the level change needs to be at least 2000 feet. Sometimes it is possible to use opposite levels for converging conflicts but this requires coordination with the downsteam sector or unit.
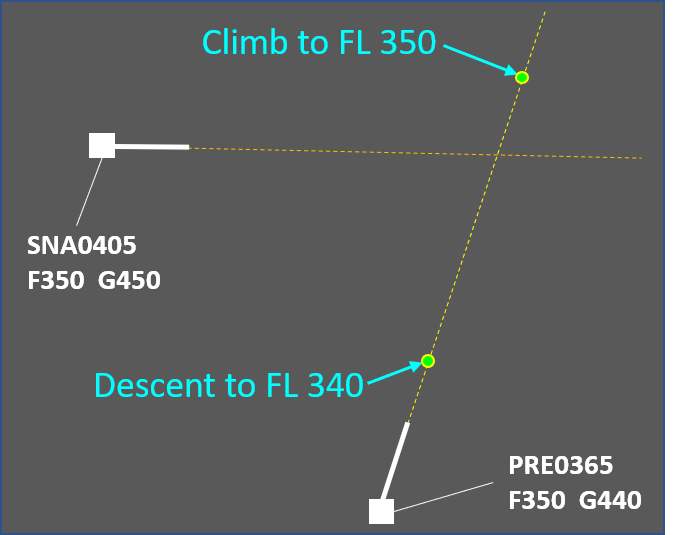
An example of using a 1000 ft level change to solve a crossing conflict - Speed control. This method is mostly suitable for solving medium-term conflicts (as the instruction takes time to "produce" separation) and for maintaining already achieved separation. A major limiting factor is the typical cruising speed. For example, trying to sequence an AIRBUS A-380-800 behind a BOEING 737-800 would likely be impracticle (though not impossible). Additional factor to consider with speed control is that the results are not as obvious as for example with level change or vectoring. This means that the controller will need to monitor the situation more frequently to make sure that (a) the flight crews comply with the instructions and (b) the speeds are not affected by changing winds. On the other hand, this method normally results in the slighest intervention of the flight plan - the trajectory and vertical profile are not changed.
- Vectoring. This is a universal method that may solve any conflict unless additional factors (such as airspace restrictions or adverse weather) limit the available headings. This benefit comes at a cost, however - vectoring usually extends the distance flown (and hence, delays the flight). This effect may sometimes be mitigated by providing a direct routing after the conflict has been solved.
- Direct routing. This method is somewhat similar to vectoring because it relies on the aircraft track being changed to an extent where the horizontal separation will no longer be reduced below the minimum. While this method has limited applicability (the results depend mostly on the flight planned route) it often contributes to flight efficiency by reducing the distance to be flown. Other benefits are that the results from the controller intervention are immediately visible and that a single message solves the conflict altogether (unlike with most other methods that follow the instruct-monitor-resume routine). There are some downsides to this solution however, e.g.:
- Depending on the specific circumstances, the flight may enter an area with strong headwinds (which the pilot tried to circumvent with the longer flight planned route).
- In most cases the flight needs to be cleared to a point that is far away which in most cases means a coordination with the next sector or unit will be necessary. This increases controller workload and also adds an element of uncertainty (the next sector controller may not approve the direct routing).
- A direct routing may solve one conflict but create another at the same time.
- Vertical speed adjustment. This technique is used in situations where an aircraft needs to safely cross another aircraft's level. If properly used, it provides safe and efficient flow of traffic. The rates of climb or descent to be assigned need to be carefully calculated to accomodate some non-compliance (e.g. if the controller assigns a rate of climb of 1500 feet per minute or greater but the aircraft actually climbs at 1300). Also, while descent rates are usually achieveable, climbing at a specified vertical speed may be outside the aircraft capability and therefore the restriction should be coordinated with the flight crew.
A combination of the methods above is sometimes used. Here are some examples:
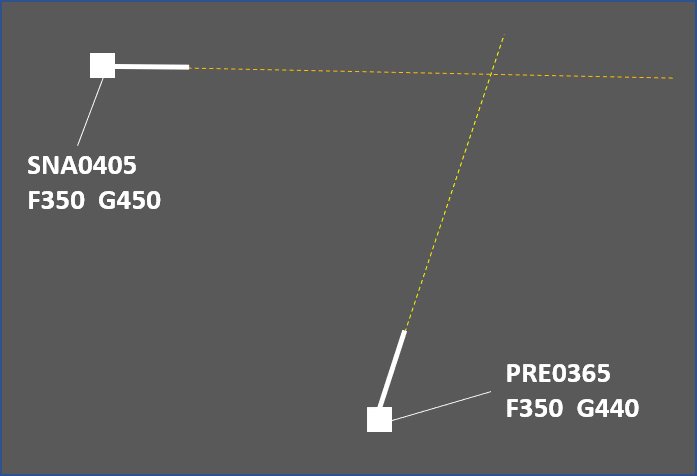
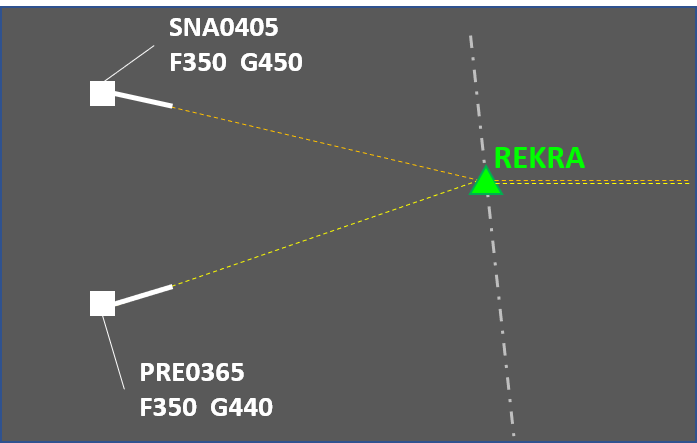
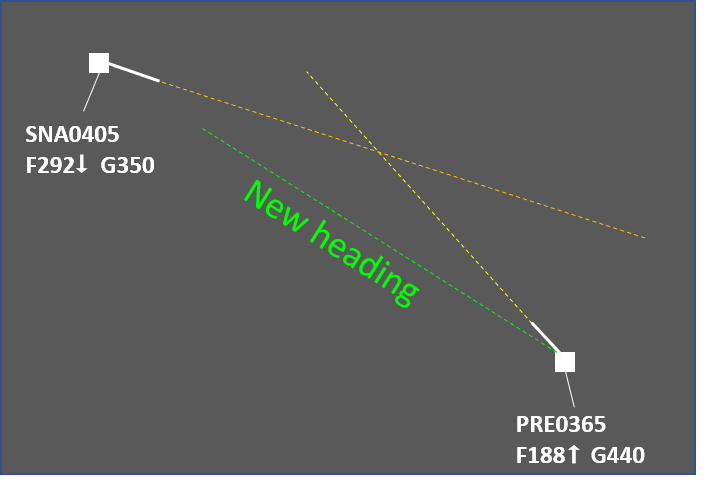
- Using vectoring to ensure horizontal separation is maintained and assigning vertical speed so that vertical separation is achieved faster (and the vectoring may be terminated sooner). This is useful for separating departing and arriving aircraft.
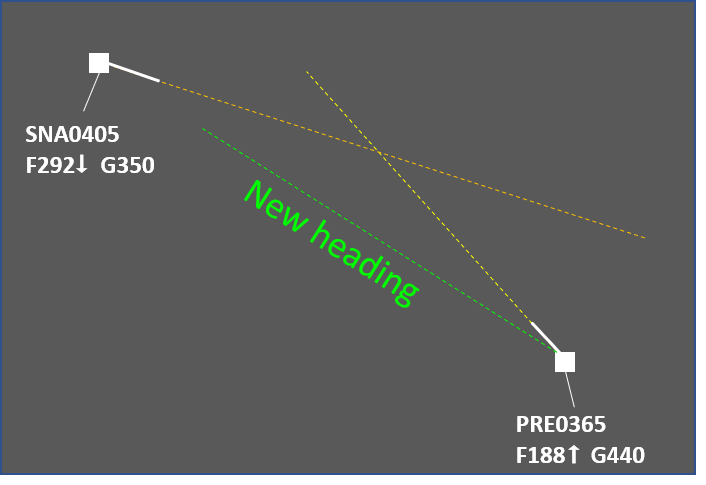
An example of using vectoring and vertical speed control. Turning PRE0365 provides safety and assigning vertical speeds results in efficiency as the flight can be returned onto the flight planned route sooner. - Combining vectoring and speed control may result in a smaller overall intervention as opposed to using vectoring only.
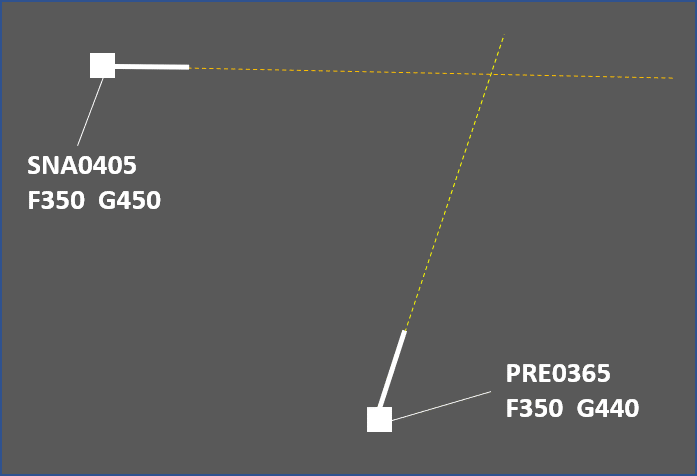
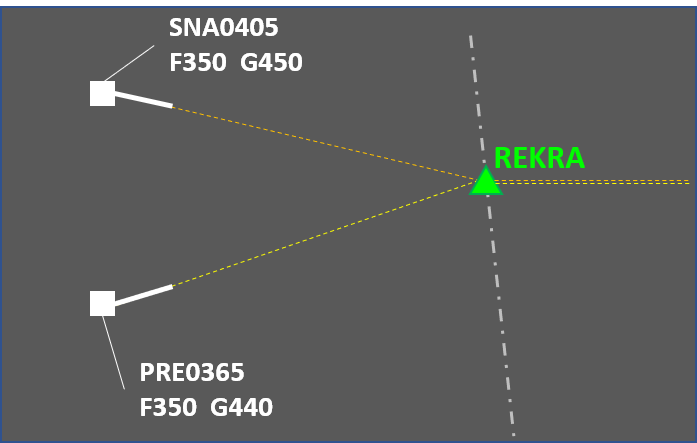
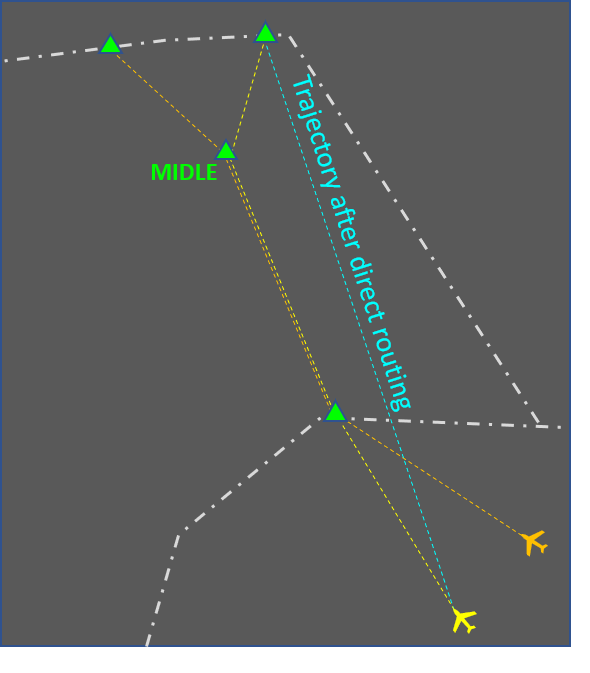
- Combining a direct routing (that makes the converging conflict a crossing one) with a level change. The benefit is that 1000 ft temporary level change may be sufficient as opposed to 2000 feet change for a longer period of time. Note that the direct routing may need to be coordinated.
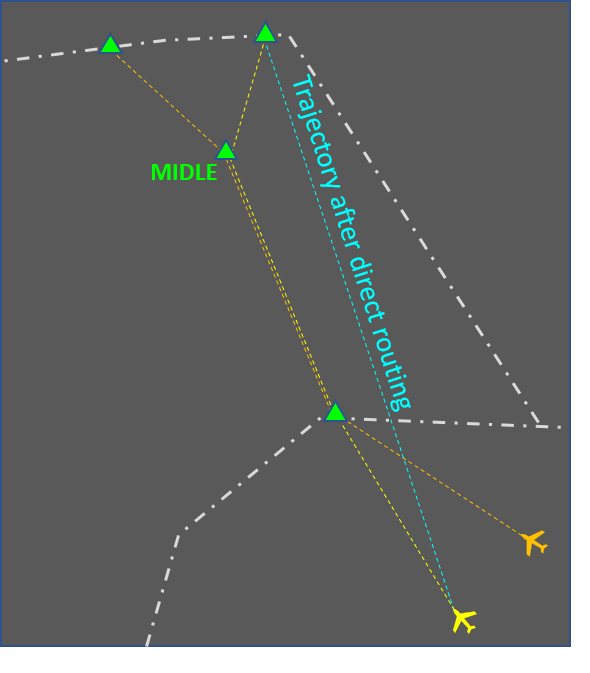
An example of using a direct route and a level change. Initially, the conflict is of the converging type. By clearing the yellow aircraft to fly on a direct route, the controller does not solve the conflict but now has the option to use 1000 ft level change for a few minutes as opposed to 2000 ft until point MIDLE.
Combined solutions need to be carefully considered. These usually increase the flight crew workload. In some cases the instructions may even be incompatible. An example of this is assigning a high rate of descent to an aircraft that has already been instructed to reduce speed.
Source: www.skybrary.aero